
In the last posting about STADYN, we put forth considerations for interface elements between the pile shaft and the soil. Before we formally incorporate these into the model (or whether we will incorporate them or not) some consideration of how the interface actually works. We will start those considerations by looking at methods by which the static capacity of driven piles is computed, and specifically the so-called “beta” methods which are used for cohesionless and sometimes cohesive soils.
Beta methods assume that the shaft resistance of the pile is a function of the effective stress of the soil along the pile shaft. They assume that the horizontal stress that results from the vertical stress acts perpendicular to the surface of the pile. The pile surface thus acts like a block on a surface with some kind of Coulombic friction acting against the downward settlement of the pile. The beta coefficient is the ratio between the vertical effective stress and the horizontal friction on the pile, or



and the coefficient of friction, or

We put these together to yield

At this point let’s make two assumptions. The first is that the lateral earth pressure coefficient is in fact the at-rest lateral earth pressure coefficient. (For some discussion of this, you can view this slide presentation.) The second is that the friction angle between the pile and the soil is in fact the same as the soil’s internal friction angle. If we use Jaky’s formula for the at-rest condition, these assumptions yield

The various components of this equation are plotted below.
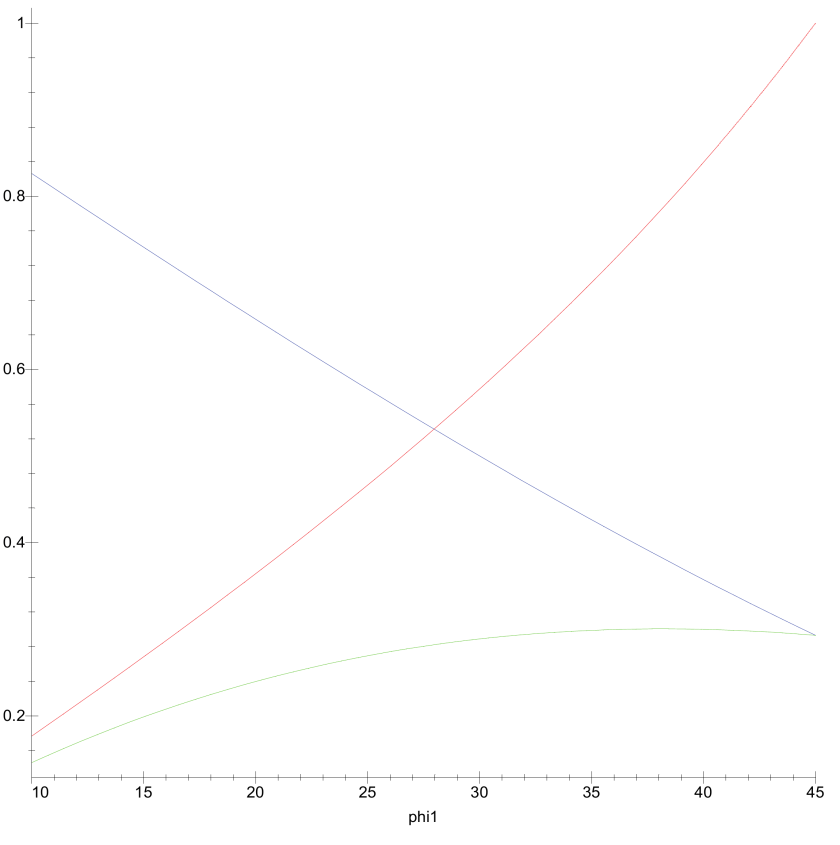
The three lines are as follows:
is in red.
is in blue.
It’s interesting to note that, as 
If this were the case in practice, estimating
Let’s start with the Dennis and Olson Method for cohesionless soils, which is described here. To arrive at
- They add a depth factor, which we will not consider. Depth factors and critical lengths are common in static methods, but they are not well documented in the field.
- They assume
if their values for friction angle are used.
- They vary the friction angle from 15-35 degrees depending upon the type of soil.
Leaving out the depth factor, for this method
An easier way to see this is to consider the method of Fellenius. His values for
- 0.15-0.35 for clay
- 0.25-0.50 for silt
- 0.30-0.90 for sand
- 0.35-0.80 for gravel
Again the range of values is greater than the figure above would indicate. Why is this?
Although it’s tempting to use a straight empirical approach, let’s back up and consider the structure of the basic equation about and the assumptions behind it. There are several ways we can alter these equations in an attempt to match field conditions better by considering these assumptions and seeing what changes might be made.
The Two Friction Angles Aren’t the Same
The first one is suggested by the notation in Dennis and Olson: the internal friction angle of the soil and that of the soil-pile interface are not the same. Retaining wall theory (when it considers friction) routinely makes this assumption; in fact, the ratio 

and be defining the ratio

we have

If we plot this in a three-dimensional way, we get the following result.
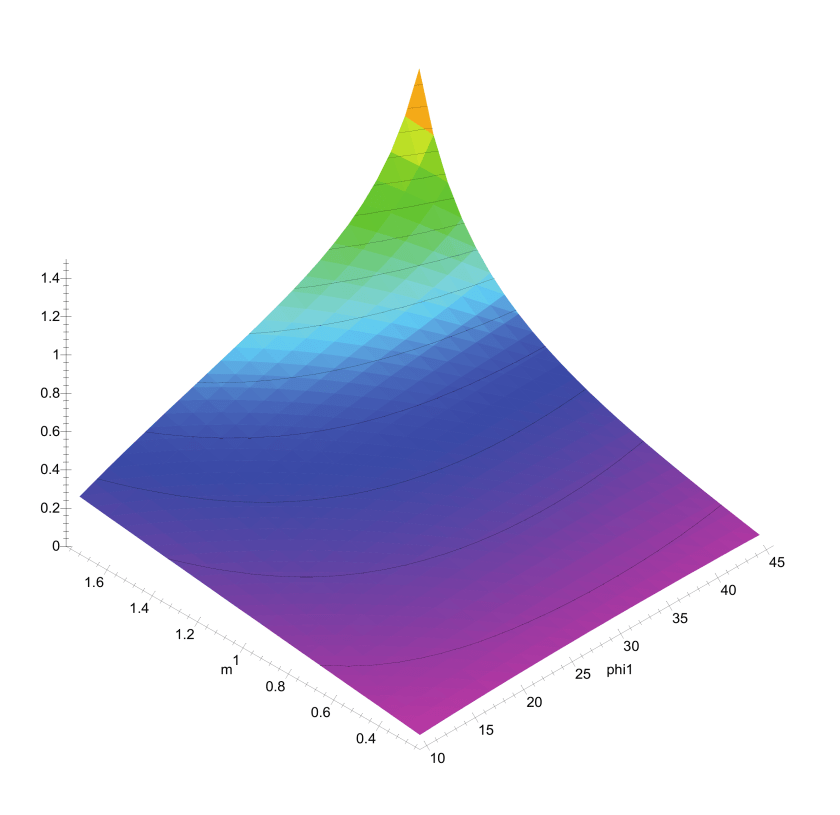

Although it’s certainly possible to have very high values of 

Jaky’s Equation Doesn’t Apply, or At-Rest Earth Pressure Conditions Are Not Present
Another assumption that can be challenged is that Jaky’s Equation doesn’t apply, or we don’t have at-rest earth pressure conditions. Although Jaky’s Equation has done well, it is certainly not the last word on the subject, especially for overconsolidated soils (which we will discuss below.) To try to “cover our bases” on this, let’s consider a range of lateral earth pressure coefficients by assuming that Jaky’s Equation is valid for the at-rest condition and that we need to somehow vary between some kind of active state and passive state. The simplest way to do this is to assume Rankine’s conditions with level backfill, which just happens to be identical to Mohr-Coulomb relationships between confining and driving stresses. (OK, it’s not all luck here…) Thus,

and

Let us also define an active-passive factor called actpas, where actpas = -1 for the active state, 0 for the at-rest state and 1 for the passive state. We then plot this equation

below. Since we only have K values for three values of actpas, we’ll use a little Lagrangian interpolation in an attempt to achieve a smooth transition between the states.

We note from this the following:
- The dip in
- Values of
- For low values of
- If we compare these values with, say, those of Fellenius or Dennis and Olson, we cannot say that the fully passive state applies for most reasonable values of
Conclusion
If we compare the results we obtain above with empirical methods for determining 


It’s tempting to simply fall back on an empirical value for
References
In addition to those in the original study, the following reference is mentioned here:
- Burland, J.B. (1973) “Shaft friction of piles in clay – A simple fundamental approach.” Ground Engineering 6(3):30-42, January.

 limiting, while at the same time running both norms to get a better feel for the differences in the results.
limiting, while at the same time running both norms to get a better feel for the differences in the results.
 , the absolute value of
, the absolute value of 

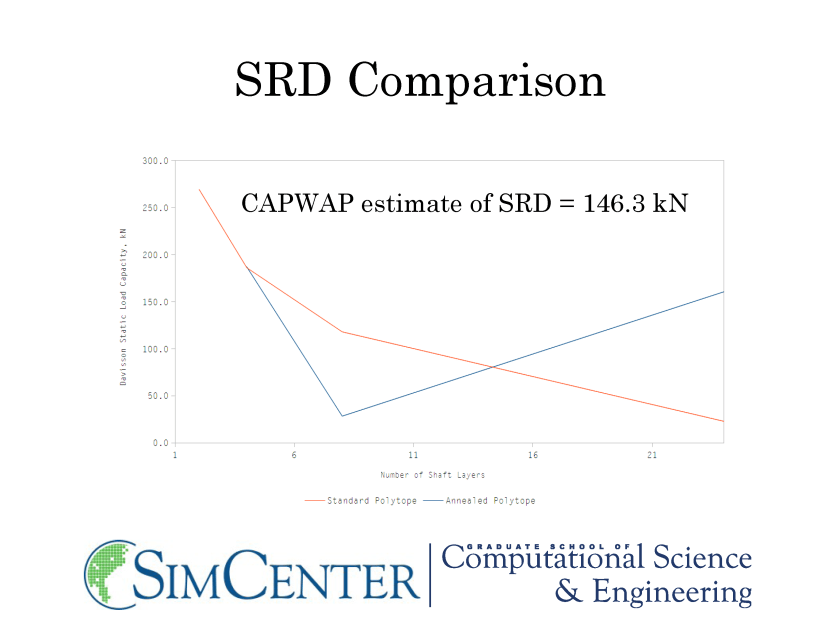

 . When we have all the differences in hand, we take them and compute a vector of differences, and then in turn take the norm of those differences. We do this successively by changing parameters until we get a norm value which is the minimum we can reach.
. When we have all the differences in hand, we take them and compute a vector of differences, and then in turn take the norm of those differences. We do this successively by changing parameters until we get a norm value which is the minimum we can reach.  values as parameters and iterate using a polytope method (standard or annealed, for our test case the latter.)
values as parameters and iterate using a polytope method (standard or annealed, for our test case the latter.)
 , which is interesting in a soil which is generally characterized as cohesive.
, which is interesting in a soil which is generally characterized as cohesive. by physical necessity.)
by physical necessity.)



 , the Match Quality difference was more pronounced. The difference norm for the Match Quality is higher than the Least Squares solution, which is to be expected.
, the Match Quality difference was more pronounced. The difference norm for the Match Quality is higher than the Least Squares solution, which is to be expected.















