
We now move from elastic considerations to plastic ones. The material that follows is adapted from this dissertation, the development of the STADYN code.
General Remarks About Plasticity
As we transition from elastic to elasto-plastic consideration, there are two things that we need to consider.
The first is that there is more than one way to implement plasticity in finite element and finite difference codes. The one we’ll be considering here–elastic-perfectly plastic behaviour using Mohr-Coulomb failure theory–is just one of them. It appears in many FEA codes, and although is justifiably described as ‘crude’ (Massarsch (1983)) it is the basis (explicit or implicit) of our current testing scheme and many of our ‘closed form’ solutions.
Alternatives not only include models such as Cam Clay but also models such as hyperbolic models. The latter have been discussed extensively on this site and will not be considered further here.
The second is that, because it is plasticity, the response of the soil to load becomes path-dependent. With elastic solutions, the response is path independent; you apply a certain load and the soil responds in a certain way irrespective of how the load is applied. With path dependence how the load is applied affects how the soil responds. This is a large part of another characteristic of plastic solutions: uniqueness issues. As a practical matter true uniqueness, which means a linear transformation which is one-on-one and unto, is impossible. We can only attempt to come up with the best solution. Whether that ‘best solution’ is acceptable depends upon the methodology used and the application. In many cases it is, in some it is not.
Failure Theory
The following is not meant to be a comprehensive treatment of the subject. Much of it is drawn from Nayak and Zienkiewicz (1972) and Owen and Hinton (1980).
According to Mohr-Coulomb theory, failure occurs when the combined stresses find themselves outside of the failure envelope defined by the equation
 (1)
(1) This is illustrated in Figure 1.

It should be noted that both Equation 1 and Figure 1 are based on the typical geotechnical sign convention of positive compression.
Failure takes place when Mohr’s Circle for the stress state either intersects or goes above the failure line. The state of intersection, in terms of the principal stresses, is expressed by Verruijt as

For many applications, such as triaxial testing, this is sufficient, as the goal is to determine parameters c and φ from the tests. But what if it is necessary to analyze stress states other than those on the failure line, as is certainly the case with finite elements? For these cases the failure criterion can be defined as
 (3)
(3) This is illustrated in Figure 2.
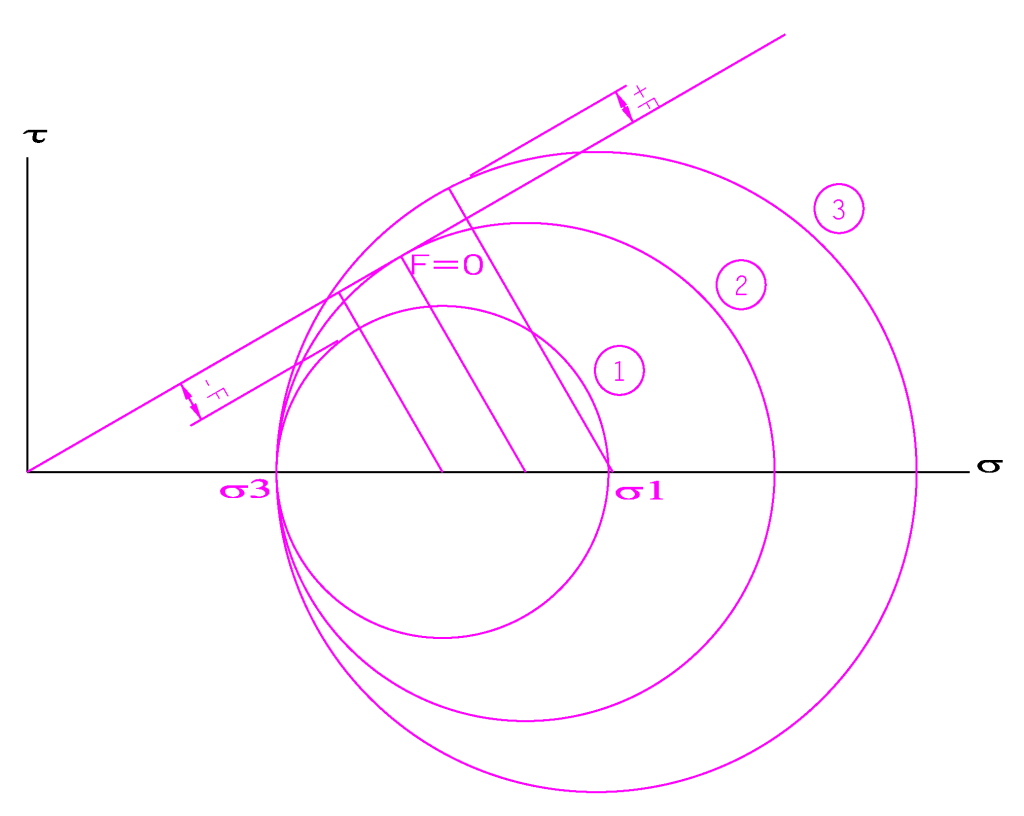
There are three possibilities for the right hand side:
- F<0 , failure has not been achieved.
- F=0 , failure has been achieved.
- F>0 , the stress state is beyond failure.
How the model responds to each of these states depends upon how the response is modeled. In any case, once F ≥ 0, the effects of further stress are irrecoverable.
For use in finite element code, it is frequently more convenient to express these using invariants. For the case of plane strain/axisymmetry in this problem (and the general case for problems of this kind) it is assumed that

and the first invariant is

The deviator stresses are defined as



The second and third deviatoric invariants are


The whole business of invariants, standard and deviatoric, is discussed in further detail here.
With all of this, Equation 3 can be restated thus:

where

The Mohr-Coulomb failure criterion is frequently depicted using a three-dimensional representation on the principal stress axes as is shown (along with the Drucker-Prager criterion) in Figure 3. On the left is the failure surface in true three-dimensional representation, and on the right is same in the octahedral plane. The significance of Lode’s Angle 

Inspection of Equation 8 shows that the failure function F is not the result of a unique combination of stresses. Additional information is available in the plastic potential function, which in turn is a function of the dilitancy of the material. The simplest way of determining this is by substituting the dilitancy angle ψ for the friction angle φ in Equation 8 (Griffiths and Willson (1986)), or

References
Abbo, A.J., Lyamin, A.V., Sloan, S.W., and Hambleton, J.P., “A C2 continuous approximation to the Mohr-Coulomb yield surface”, International Journal of Solids and Structures 48, 21 (2011), pp. 3001–3010.
Gourdin, A. and Boumahrat, M., Méthodes Numériques Appliquées (Paris, France: Téchnique et Documentation-Lavoisier, 1989).
Griffiths, D.V. and Willson, S.M., “An explicit form of the plastic matrix for a Mohr-Coulomb material”, Communications in Applied Numerical Methods 2, 5 (1986), pp. 523–529.
Massarsch, K. Rainer, “Vibration Problems in Soft Soils”, Proceedings of the Symposium on Recent Developments in Laboratory and Field Tests and Analysis of Geotechnical Problems (1983), pp. 539-549.
Nayak, G.C. and Zienkiewicz, O.C., “Elasto/plastic stress analysis. An generalisation for various constitutive relationships.”, International Journal of Numerical Methods in Engineering 5, 1 (1972), pp. 113–135.
Ortiz, M. and Simo, J.C., “An Analysis of a New Class of Integration Algorithms for Elastoplastic Constitutive Relations”, International Journal for Numerical Methods in Engineering 23, 3 (1986), pp. 353–366.
Owen, D.R.J. and Hinton, E., Finite Elements in Plasticity: Theory and Practice (Swansea, Wales: Pineridge Press, 1980).
Potts, D.M. and Zdravković, L., Finite Element Analysis in Geotechnical Engineering: Theory (London, UK: Thomas Telford Publishing, 1999).
Sloan, S.W., “Substepping Schemes for the Numerical Integration of Elastoplastic Stress-Strain Relations”, International Journal for Numerical Methods in Engineering 24, 5 (1987), pp. 893–911.
Verruijt, Arnold and van Baars, S., Soil Mechanics (The Netherlands: VSSD, 2007).
Warrington, Don C., “Application of the STADYN Program to Analyze Piles Driven Into Sand“, vulcanhammer.net (2019).
Nomenclature
Strain
Elastic Strain
Plastic Strain
Strains in Polar Directions
Lamé’s Constant, Pa
Elasto-Plastic Normality or Plasticity Constant
Internal Friction Angle, Degrees or Radians
Dilitancy Angle, Degrees or Radians
Deviator Stress in Cartesian Directions, Pa
Principal Stresses, Pa
Normal Stressees in Cartesian Directions, Pa
Shear Stress, Pa
Shear Stressees in Cartesian Directions, Pa
Plastic Function Vector
Failure Function Subvectors
Constant for Substepping Algorithm
Failure Function Vector
Cohesion, Pa
Failure Function Subconstants
Elastic Constitutive Matrix
Plastic Constitutive Matrix
Elasto-Plastic Constitutive Matrix
Mohr-Coulomb Failure Criterion, Pa
Shear Modulus of Elasticity, Pa
Second Deviatoric Stress Invariant, Pa
Third Deviatoric Stress Invariant, Pa
First Stress Invariant, Pa
Tangent Stiffness Matrix
Time or Newton Step Number
Plasticity Potential Function, Pa

2 thoughts on “An Overview of Mohr-Coulomb Failure Theory”