Initial pile length reduced to 50′, and initial phreatic surface depth reduced to 25′.
H-Piles excluded from toe plugging.
Strain softening coefficient for soil shear modulus increased for more realistic values.
Toe quake for cohesive soils set to more conventional values, as Tomlinson’s method was used to compute Nq.
Added Davisson’s Method line for evaluation of virtual pile load test, and flipped the graph to more realistically simulate actual load-settlement curves. (See above for the new format.)
Marked the target SRD value differently to make it easier to see.
This will probably be the last update to the routine, which first went online in 2005. We hope that you find it useful.
One of the things that was attempted in the TAMWAVE project is the use of cavity expansion theory to estimate soil set-up in cohesive soils. Doing this, however, brought some complications that need some explanation.
Cavity expansion theory is basically the study of what happens when one body expands inside of another. When this takes places, additional radial stresses (most analyses center around a cylinder or sphere) are generated. In the case of driven piles, these additional stresses add to the pile’s resistance to load. It can be argued that cavity expansion is one of the key advantages of driven piles. In the case of drilled piles such as drilled shafts or auger-cast piles, this does not take place, as the soil is removed either before or during the actual pile installation. The result of this is that driven piles, for the same length and diameter as a corresponding drilled pile, a driven pile will have a greater resistance to load (ultimate capacity.)
Applying cavity expansion theory to piles has a long history and is detailed in documents such as Randolph, Carter and Wroth (1979) and Yu and Houlsby (1991). Our particular interest is with clays because, in addition to the changes in the soil from cavity expansion, the pore water pressure increases. This is the primary (but not the only) reason why the SRD (soil resistance to driving) in cohesive soils is significantly less than the ultimate capacity; this fact inevitably complicates drivability studies.
The increase in pore water pressure is a dynamic phenomenon; it experiences a sudden increase during driving and then gradually dissipates after installation. How gradually the latter takes place depends on many factors such as the permeability of the soil. Study of this phenomenon is well represented in the literature; however, for the TAMWAVE project it is not really of interest. The primary interest here is the value of SRD after the immediate increase of pore water pressures during driving.
Both cavity expansion theory and practice show that excess pore water pressures can easily exceed the effective stresses. In principle, considering that we have established the beta (effective-stress dependent) method for both cohesionless and cohesive soils, this can mean a complete loss of SRD. Although dramatic drops in SRD are not unknown, for most piles this is unrealistic. The reason for this is that, like the dissipation, the build-up of pore water pressures is a dynamic phenomenon, albeit in a much smaller time frame. Dissipation, hindered as it is by the low permeability of cohesive soils, begins immediately. Pore water pressures (along with any other stresses induced by cavity expansion) also vary with the distance from the pile.
The result of all this is that prediction of both the increase of pore water pressure and its effect on the SRD of the pile during driving is a complicated phenomenon that is not completely represented by closed-form cavity expansion based solutions. For a project such as this, what we need is something that will give a reasonable representation of soil set-up for cohesive soils. To accomplish this, we stick with computing the excess pore water pressure, but with a different methodology. We assume the following:
Assuming all that, for a soil set-up factor (from this source, loosely adapted) , the excess pore water pressures that affect the effective stress (which in turn determine the shaft friction) are computed by the equation
This gives identical results to those when the are applied directly.
In practice this phenomenon is still subject to investigation. Some of the research involves use of numerical methods (such as finite element methods) to simulate cavity expansion effects. This is doubtless an advance over the closed-form solutions of the past, and a necessity given the complexity of the physics of the problem. Empirical methods are also still being developed, such as are documented by Wang, Verma and Steward (2009).
The completely revised TAMWAVE program is now available. The goal of this project is to produce a free, online set of routines which analyse driven piles for axial and lateral load-deflection characteristics and drivability by the wave equation. The program is not intended for commercial use but for educational purposes, to introduce students to both the wave equation and methods for estimating load-deflection characteristics of piles in both axial and lateral loading.
We have a series of posts which detail the theory behind and workings of the program:
The analysis procedure is exactly the same. We will first discuss the differences between the two, then consider an example.
Differences with Piles in Cohesive Soils
The unit weight is in put as a saturated unit weight, and the specific gravity of the soil particles is different (but not by much.)
Once the simulated CPT data was abandoned, the “traditional” Tomlinson formula for the unit toe resistance, namely , where , was chosen.
The ultimate resistance along the shaft is done using the formula of Kolk and van der Velde (1996). This was used as a beta method, for compatibility with the method used for cohesionless soils. Unless the ratio of the cohesion to the effective stress is constant, the whole concept of a constant lateral pressure due to cohesion needs to be discarded.
For saturated cohesive soils, an estimate of pile set-up is done using cavity expansion methods. Originally excess pore pressure due to cavity expansion during driving was estimated using the method described by Randolph (2003); however, this ran into difficulties and a different method was substituted, which is described here. This excess pore pressure is then added to the existing pore pressure and a new effective stress is computed at each point for the Kolk and van der Velde method. The results are within reasonable ranges.
Test Case
This slideshow requires JavaScript.
The only change in basic parameters from the other case was the change to a CH soil. We opted not to perform a lateral load test this time, although the program is certainly capable of using the CLM 2 method with cohesive soils.
Pile Data
Pile Designation
12 In. Square
Pile Material
Concrete
Penetration of Pile into the Soil, ft.
100
Basic “diameter” or size of the pile, ft.
1
Cross-sectional Area of the Pile, ft2
1.000
Pile Toe Area, ft2
1.000
Perimeter of the Pile, ft.
4.000
Soil Data
Type of Soil
CH
Specific Gravity of Solids
2.7
Void Ratio
0.84
Dry Unit Weight, pcf
91.5
Saturated Unit Weight, pcf
120.0
Soil Internal Friction Angle phi, degrees
Cohesion c, psf
750
SPT N60, blows/foot
6
CPT qc, psf
12,696
Distance of Water Table from Soil Surface, ft.
50
Penetration of Pile into Water Table, ft.
50
Pile Toe Results
Effective Stress at Pile Toe, ksf
7.454
SPT (N1)60 at pile toe, blows/foot
3
Unit Toe Resistance qp, ksf
6.8
Shear Modulus at Pile Toe, ksf
474.8
Toe Spring Constant Depth Factor
1.366
Toe Spring Constant, kips/ft
2,358.0
Pile Toe Quake, in.
0.034
Poisson’s Ratio at Pile Toe
0.500
Toe Damping, kips-sec/ft
14.0
Toe Smith-Type Damping Constant, sec/ft
2.069
Total Static Toe Resistance Qp, kips
6.75
Pile Toe Plugged?
Yes
Final Results
Total Shaft Friction Qs, kips
219.92
Ultimate Axial Capacity of Pile, kips
226.67
Pile Setup Factor
2.0
Total Pile Soil Resistance to Driving (SRD), kips
115.44
Shaft Segment Properties
Depth at Centre of Layer, feet
Soil Shear Modulus, ksf
Beta
Quake,inches
Maximum Load Transfer, ksf
Spring Constant for Wall Shear, ksf/in
Smith-Type Damping Constant, sec/ft
Maximum Load Transfer During Driving (SRD), ksf
0.50
34.9
2.541
0.0400
0.116
2.91
2.709
0.116
1.50
60.4
1.180
0.0322
0.162
5.03
2.559
0.162
2.50
78.0
0.827
0.0291
0.189
6.50
2.489
0.189
3.50
92.2
0.655
0.0273
0.210
7.69
2.443
0.210
4.50
104.6
0.550
0.0260
0.227
8.72
2.407
0.227
5.50
115.6
0.479
0.0250
0.241
9.64
2.378
0.241
6.50
125.7
0.427
0.0243
0.254
10.48
2.353
0.254
7.50
135.0
0.387
0.0236
0.266
11.25
2.332
0.266
8.50
143.8
0.356
0.0231
0.277
11.98
2.312
0.277
9.50
152.0
0.330
0.0226
0.287
12.66
2.294
0.287
10.50
159.8
0.308
0.0222
0.296
13.31
2.278
0.296
11.50
167.2
0.290
0.0219
0.305
13.93
2.262
0.305
12.50
174.3
0.274
0.0216
0.313
14.53
2.248
0.313
13.50
181.2
0.260
0.0213
0.321
15.10
2.234
0.321
14.50
187.8
0.248
0.0210
0.329
15.65
2.221
0.329
15.50
194.1
0.237
0.0208
0.336
16.18
2.208
0.336
16.50
200.3
0.228
0.0206
0.344
16.69
2.196
0.344
17.50
206.3
0.219
0.0204
0.351
17.19
2.184
0.351
18.50
212.1
0.211
0.0202
0.357
17.67
2.173
0.357
19.50
217.7
0.204
0.0201
0.364
18.14
2.162
0.364
20.50
223.2
0.197
0.0199
0.370
18.60
2.151
0.370
21.50
228.6
0.191
0.0198
0.377
19.05
2.141
0.377
22.50
233.9
0.186
0.0196
0.383
19.49
2.130
0.383
23.50
239.0
0.181
0.0195
0.389
19.92
2.120
0.389
24.50
244.1
0.176
0.0194
0.395
20.34
2.110
0.395
25.50
249.0
0.172
0.0193
0.401
20.75
2.100
0.401
26.50
253.8
0.168
0.0192
0.406
21.15
2.091
0.406
27.50
258.6
0.164
0.0191
0.412
21.55
2.081
0.412
28.50
263.2
0.160
0.0190
0.418
21.94
2.072
0.418
29.50
267.8
0.157
0.0190
0.423
22.32
2.062
0.423
30.50
272.3
0.154
0.0189
0.429
22.69
2.053
0.429
31.50
276.7
0.151
0.0188
0.434
23.06
2.044
0.434
32.50
281.1
0.148
0.0188
0.439
23.42
2.034
0.439
33.50
285.4
0.145
0.0187
0.445
23.78
2.025
0.445
34.50
289.6
0.143
0.0186
0.450
24.13
2.016
0.450
35.50
293.8
0.140
0.0186
0.455
24.48
2.007
0.455
36.50
297.9
0.138
0.0186
0.461
24.82
1.998
0.461
37.50
301.9
0.136
0.0185
0.466
25.16
1.989
0.466
38.50
305.9
0.134
0.0185
0.471
25.49
1.980
0.471
39.50
309.9
0.132
0.0184
0.476
25.82
1.971
0.476
40.50
313.8
0.130
0.0184
0.481
26.15
1.962
0.481
41.50
317.6
0.128
0.0184
0.487
26.47
1.953
0.487
42.50
321.4
0.126
0.0184
0.492
26.79
1.944
0.492
43.50
325.2
0.125
0.0183
0.497
27.10
1.935
0.497
44.50
328.9
0.123
0.0183
0.502
27.41
1.926
0.502
45.50
332.6
0.122
0.0183
0.507
27.72
1.917
0.507
46.50
336.2
0.120
0.0183
0.513
28.02
1.908
0.513
47.50
339.8
0.119
0.0183
0.518
28.32
1.898
0.518
48.50
343.4
0.118
0.0183
0.523
28.61
1.889
0.523
49.50
346.9
0.117
0.0183
0.528
28.91
1.880
0.528
50.50
349.7
0.116
0.0183
0.533
29.15
1.871
0.000
51.50
351.9
0.115
0.0183
0.537
29.33
1.862
0.005
52.50
354.1
0.115
0.0184
0.541
29.51
1.853
0.011
53.50
356.2
0.114
0.0184
0.546
29.69
1.844
0.018
54.50
358.4
0.114
0.0184
0.550
29.87
1.835
0.023
55.50
360.5
0.113
0.0185
0.555
30.04
1.826
0.029
56.50
362.6
0.113
0.0185
0.559
30.22
1.816
0.035
57.50
364.7
0.113
0.0185
0.564
30.39
1.807
0.041
58.50
366.8
0.112
0.0186
0.568
30.57
1.797
0.047
59.50
368.9
0.112
0.0186
0.573
30.74
1.788
0.053
60.50
371.0
0.112
0.0187
0.578
30.92
1.778
0.059
61.50
373.0
0.111
0.0187
0.583
31.09
1.768
0.064
62.50
375.1
0.111
0.0188
0.588
31.26
1.757
0.070
63.50
377.1
0.111
0.0189
0.593
31.43
1.747
0.076
64.50
379.1
0.111
0.0189
0.598
31.60
1.736
0.082
65.50
381.2
0.110
0.0190
0.603
31.76
1.726
0.088
66.50
383.2
0.110
0.0191
0.609
31.93
1.715
0.093
67.50
385.2
0.110
0.0191
0.614
32.10
1.703
0.099
68.50
387.1
0.110
0.0192
0.620
32.26
1.692
0.105
69.50
389.1
0.110
0.0193
0.626
32.43
1.680
0.111
70.50
391.1
0.110
0.0194
0.632
32.59
1.668
0.117
71.50
393.0
0.110
0.0195
0.638
32.75
1.656
0.123
72.50
395.0
0.110
0.0196
0.645
32.91
1.643
0.129
73.50
396.9
0.110
0.0197
0.652
33.07
1.630
0.135
74.50
398.8
0.110
0.0198
0.659
33.23
1.617
0.141
75.50
400.7
0.110
0.0199
0.666
33.39
1.603
0.147
76.50
402.6
0.110
0.0201
0.673
33.55
1.589
0.153
77.50
404.5
0.111
0.0202
0.681
33.71
1.575
0.159
78.50
406.4
0.111
0.0203
0.689
33.87
1.560
0.166
79.50
408.3
0.111
0.0205
0.698
34.03
1.544
0.172
80.50
410.2
0.112
0.0207
0.707
34.18
1.528
0.179
81.50
412.0
0.112
0.0209
0.716
34.34
1.512
0.186
82.50
413.9
0.113
0.0211
0.726
34.49
1.494
0.193
83.50
415.7
0.113
0.0213
0.737
34.64
1.476
0.200
84.50
417.6
0.114
0.0215
0.748
34.80
1.457
0.207
85.50
419.4
0.115
0.0217
0.760
34.95
1.437
0.215
86.50
421.2
0.116
0.0220
0.773
35.10
1.416
0.223
87.50
423.0
0.117
0.0223
0.787
35.25
1.394
0.232
88.50
424.8
0.118
0.0227
0.802
35.40
1.370
0.241
89.50
426.6
0.120
0.0230
0.819
35.55
1.345
0.250
90.50
428.4
0.121
0.0235
0.838
35.70
1.318
0.260
91.50
430.2
0.123
0.0239
0.859
35.85
1.288
0.271
92.50
432.0
0.126
0.0245
0.882
36.00
1.256
0.283
93.50
433.8
0.129
0.0252
0.910
36.15
1.220
0.297
94.50
435.5
0.132
0.0260
0.944
36.29
1.179
0.313
95.50
437.3
0.137
0.0270
0.985
36.44
1.133
0.331
96.50
439.0
0.143
0.0284
1.038
36.58
1.077
0.354
97.50
440.8
0.152
0.0303
1.113
36.73
1.006
0.385
98.50
442.5
0.168
0.0335
1.235
36.87
0.908
0.433
99.50
444.2
0.181
0.0363
1.343
37.02
0.837
0.477
Data for Axial Load Analysis using ALP Method
Length of the pile, in.
1,200.0
Axial stiffness EA. lbs.
720,000,000
Circumference, in.
48.000
Point resistance, lbs.
6,750
Quake of the point, in.
0.034
Number of pile elements
100
Number of loading steps
20
Maximum pile load, lbs.
226,672.5
Load Increment, lbs.
22,667.3
Failure Load, lbs.
226,672.5
Results for Loading and Unloading Test
Load Step
Force at Pile Head, kips
Pile Head Deflection, in.
Number of Plastic Shaft Springs
0
0.0
0.000
0
1
22.7
0.012
0
2
45.3
0.025
0
3
68.0
0.039
18
4
90.7
0.058
33
5
113.3
0.082
44
6
136.0
0.109
55
7
158.7
0.140
64
8
181.3
0.175
74
9
204.0
0.214
84
10
226.7
0.271
100
11
204.0
0.259
0
12
181.3
0.246
0
13
158.7
0.234
0
14
136.0
0.221
0
15
113.3
0.209
7
16
90.7
0.193
18
17
68.0
0.175
27
18
45.3
0.154
33
19
22.7
0.132
39
20
-0.0
0.108
44
Plotted Results x-axis = Pile Head Force y-axis = Pile Head Deflection Plot Limits: x-axis from -0.000 to 226.673 y-axis from 0.000 to 0.271
Although the cohesive soils yield very different results from the cohesionless ones, the presentation is the same. Note the significant difference between the element/segment SRD for the static resistance and with the pore pressure increase included. The pile set-up factor is about 2, which is within an acceptable range. This does not apply to the toe.
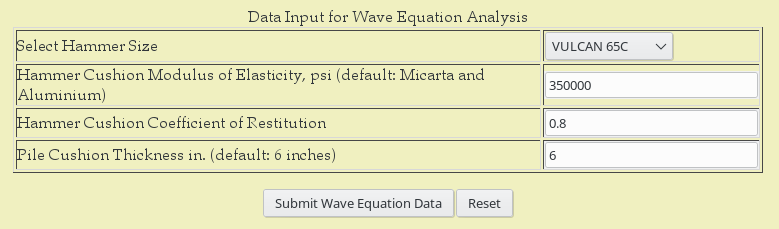
The input for the wave equation is identical, except for the hammer selected, which is much smaller than for the cohesionless soils. This is not due to set-up but to the lower capacity of the pile; the hammer selection does not account for set-up. The user will have to select a smaller hammer size to take full advantage of this, depending upon the results.
General Output for Wave Equation Analysis
2018-01-06T15:59:49-05:00
Time Step, msec
0.04024
Pile Weight, lbs.
15,000
Pile Stiffness, lb/ft
600,000
Pile Impedance, lb-sec/ft
57,937.5
L/c, msec
8.04688
Pile Toe Element Number
102
Length of Pile Segments, ft.
1
Hammer Manufacturer and Size
VULCAN 65C
Hammer Rated Striking Energy, ft-lbs
19175
Hammer Efficiency, percent
50
Length of Hammer Cushion Stack, in.
18.5
Soil Resistance to Driving (SRD) for detailed results only, kips
115.4
Percent at Toe
5.85
Toe Quake, in.
0.009
Toe Damping, sec/ft
2.07
Initial Element Output
SRD = 115.44 kips
Element
Element Weight, lbs.
Element Stiffness, kips/in
Element Cross-Sectional Area, in2
Element Soil Resistance, kips
Element Coefficient of Restitution
Element Initial Velocity, ft/sec
Element Soil Shaft Stiffness, kips/in
Element Quake, in.
Element Damping, sec/ft
Ram
6,500.0
1,880.5
99.40
0.0
0.80
9.74
0.0
1,000.000
0.00
Driving Accessory
1,100.0
711.5
144.00
0.0
0.51
0.00
0.0
1,000.000
0.00
Pile Head
150.0
60,000.0
144.00
0.5
1.00
0.00
11.6
0.040
2.71
4
150.0
60,000.0
144.00
0.6
1.00
0.00
20.1
0.032
2.56
5
150.0
60,000.0
144.00
0.8
1.00
0.00
26.0
0.029
2.49
6
150.0
60,000.0
144.00
0.8
1.00
0.00
30.7
0.027
2.44
7
150.0
60,000.0
144.00
0.9
1.00
0.00
34.9
0.026
2.41
8
150.0
60,000.0
144.00
1.0
1.00
0.00
38.5
0.025
2.38
9
150.0
60,000.0
144.00
1.0
1.00
0.00
41.9
0.024
2.35
10
150.0
60,000.0
144.00
1.1
1.00
0.00
45.0
0.024
2.33
11
150.0
60,000.0
144.00
1.1
1.00
0.00
47.9
0.023
2.31
12
150.0
60,000.0
144.00
1.1
1.00
0.00
50.7
0.023
2.29
13
150.0
60,000.0
144.00
1.2
1.00
0.00
53.3
0.022
2.28
14
150.0
60,000.0
144.00
1.2
1.00
0.00
55.7
0.022
2.26
15
150.0
60,000.0
144.00
1.3
1.00
0.00
58.1
0.022
2.25
16
150.0
60,000.0
144.00
1.3
1.00
0.00
60.4
0.021
2.23
17
150.0
60,000.0
144.00
1.3
1.00
0.00
62.6
0.021
2.22
18
150.0
60,000.0
144.00
1.3
1.00
0.00
64.7
0.021
2.21
19
150.0
60,000.0
144.00
1.4
1.00
0.00
66.8
0.021
2.20
20
150.0
60,000.0
144.00
1.4
1.00
0.00
68.8
0.020
2.18
21
150.0
60,000.0
144.00
1.4
1.00
0.00
70.7
0.020
2.17
22
150.0
60,000.0
144.00
1.5
1.00
0.00
72.6
0.020
2.16
23
150.0
60,000.0
144.00
1.5
1.00
0.00
74.4
0.020
2.15
24
150.0
60,000.0
144.00
1.5
1.00
0.00
76.2
0.020
2.14
25
150.0
60,000.0
144.00
1.5
1.00
0.00
78.0
0.020
2.13
26
150.0
60,000.0
144.00
1.6
1.00
0.00
79.7
0.020
2.12
27
150.0
60,000.0
144.00
1.6
1.00
0.00
81.4
0.019
2.11
28
150.0
60,000.0
144.00
1.6
1.00
0.00
83.0
0.019
2.10
29
150.0
60,000.0
144.00
1.6
1.00
0.00
84.6
0.019
2.09
30
150.0
60,000.0
144.00
1.6
1.00
0.00
86.2
0.019
2.08
31
150.0
60,000.0
144.00
1.7
1.00
0.00
87.7
0.019
2.07
32
150.0
60,000.0
144.00
1.7
1.00
0.00
89.3
0.019
2.06
33
150.0
60,000.0
144.00
1.7
1.00
0.00
90.8
0.019
2.05
34
150.0
60,000.0
144.00
1.7
1.00
0.00
92.2
0.019
2.04
35
150.0
60,000.0
144.00
1.8
1.00
0.00
93.7
0.019
2.03
36
150.0
60,000.0
144.00
1.8
1.00
0.00
95.1
0.019
2.03
37
150.0
60,000.0
144.00
1.8
1.00
0.00
96.5
0.019
2.02
38
150.0
60,000.0
144.00
1.8
1.00
0.00
97.9
0.019
2.01
39
150.0
60,000.0
144.00
1.8
1.00
0.00
99.3
0.019
2.00
40
150.0
60,000.0
144.00
1.9
1.00
0.00
100.6
0.019
1.99
41
150.0
60,000.0
144.00
1.9
1.00
0.00
102.0
0.018
1.98
42
150.0
60,000.0
144.00
1.9
1.00
0.00
103.3
0.018
1.97
43
150.0
60,000.0
144.00
1.9
1.00
0.00
104.6
0.018
1.96
44
150.0
60,000.0
144.00
1.9
1.00
0.00
105.9
0.018
1.95
45
150.0
60,000.0
144.00
2.0
1.00
0.00
107.1
0.018
1.94
46
150.0
60,000.0
144.00
2.0
1.00
0.00
108.4
0.018
1.93
47
150.0
60,000.0
144.00
2.0
1.00
0.00
109.6
0.018
1.93
48
150.0
60,000.0
144.00
2.0
1.00
0.00
110.9
0.018
1.92
49
150.0
60,000.0
144.00
2.1
1.00
0.00
112.1
0.018
1.91
50
150.0
60,000.0
144.00
2.1
1.00
0.00
113.3
0.018
1.90
51
150.0
60,000.0
144.00
2.1
1.00
0.00
114.5
0.018
1.89
52
150.0
60,000.0
144.00
2.1
1.00
0.00
115.6
0.018
1.88
53
150.0
60,000.0
144.00
0.0
1.00
0.00
0.0
0.018
1.87
54
150.0
60,000.0
144.00
0.0
1.00
0.00
1.2
0.018
1.86
55
150.0
60,000.0
144.00
0.0
1.00
0.00
2.5
0.018
1.85
56
150.0
60,000.0
144.00
0.1
1.00
0.00
3.8
0.018
1.84
57
150.0
60,000.0
144.00
0.1
1.00
0.00
5.1
0.018
1.84
58
150.0
60,000.0
144.00
0.1
1.00
0.00
6.4
0.018
1.83
59
150.0
60,000.0
144.00
0.1
1.00
0.00
7.6
0.018
1.82
60
150.0
60,000.0
144.00
0.2
1.00
0.00
8.9
0.019
1.81
61
150.0
60,000.0
144.00
0.2
1.00
0.00
10.1
0.019
1.80
62
150.0
60,000.0
144.00
0.2
1.00
0.00
11.3
0.019
1.79
63
150.0
60,000.0
144.00
0.2
1.00
0.00
12.6
0.019
1.78
64
150.0
60,000.0
144.00
0.3
1.00
0.00
13.8
0.019
1.77
65
150.0
60,000.0
144.00
0.3
1.00
0.00
14.9
0.019
1.76
66
150.0
60,000.0
144.00
0.3
1.00
0.00
16.1
0.019
1.75
67
150.0
60,000.0
144.00
0.3
1.00
0.00
17.3
0.019
1.74
68
150.0
60,000.0
144.00
0.4
1.00
0.00
18.4
0.019
1.73
69
150.0
60,000.0
144.00
0.4
1.00
0.00
19.6
0.019
1.71
70
150.0
60,000.0
144.00
0.4
1.00
0.00
20.7
0.019
1.70
71
150.0
60,000.0
144.00
0.4
1.00
0.00
21.8
0.019
1.69
72
150.0
60,000.0
144.00
0.4
1.00
0.00
23.0
0.019
1.68
73
150.0
60,000.0
144.00
0.5
1.00
0.00
24.1
0.019
1.67
74
150.0
60,000.0
144.00
0.5
1.00
0.00
25.2
0.019
1.66
75
150.0
60,000.0
144.00
0.5
1.00
0.00
26.2
0.020
1.64
76
150.0
60,000.0
144.00
0.5
1.00
0.00
27.3
0.020
1.63
77
150.0
60,000.0
144.00
0.6
1.00
0.00
28.4
0.020
1.62
78
150.0
60,000.0
144.00
0.6
1.00
0.00
29.4
0.020
1.60
79
150.0
60,000.0
144.00
0.6
1.00
0.00
30.5
0.020
1.59
80
150.0
60,000.0
144.00
0.6
1.00
0.00
31.5
0.020
1.57
81
150.0
60,000.0
144.00
0.7
1.00
0.00
32.6
0.020
1.56
82
150.0
60,000.0
144.00
0.7
1.00
0.00
33.6
0.021
1.54
83
150.0
60,000.0
144.00
0.7
1.00
0.00
34.6
0.021
1.53
84
150.0
60,000.0
144.00
0.7
1.00
0.00
35.6
0.021
1.51
85
150.0
60,000.0
144.00
0.8
1.00
0.00
36.6
0.021
1.49
86
150.0
60,000.0
144.00
0.8
1.00
0.00
37.6
0.021
1.48
87
150.0
60,000.0
144.00
0.8
1.00
0.00
38.6
0.021
1.46
88
150.0
60,000.0
144.00
0.9
1.00
0.00
39.6
0.022
1.44
89
150.0
60,000.0
144.00
0.9
1.00
0.00
40.6
0.022
1.42
90
150.0
60,000.0
144.00
0.9
1.00
0.00
41.5
0.022
1.39
91
150.0
60,000.0
144.00
1.0
1.00
0.00
42.5
0.023
1.37
92
150.0
60,000.0
144.00
1.0
1.00
0.00
43.4
0.023
1.34
93
150.0
60,000.0
144.00
1.0
1.00
0.00
44.4
0.023
1.32
94
150.0
60,000.0
144.00
1.1
1.00
0.00
45.3
0.024
1.29
95
150.0
60,000.0
144.00
1.1
1.00
0.00
46.2
0.025
1.26
96
150.0
60,000.0
144.00
1.2
1.00
0.00
47.2
0.025
1.22
97
150.0
60,000.0
144.00
1.3
1.00
0.00
48.1
0.026
1.18
98
150.0
60,000.0
144.00
1.3
1.00
0.00
49.0
0.027
1.13
99
150.0
60,000.0
144.00
1.4
1.00
0.00
49.9
0.028
1.08
100
150.0
60,000.0
144.00
1.5
1.00
0.00
50.8
0.030
1.01
101
150.0
60,000.0
144.00
1.7
1.00
0.00
51.7
0.034
0.91
102
150.0
786.0
144.00
1.9
1.00
0.00
52.6
0.036
0.84
Pile Toe
0.0
786.0
144.00
6.8
0.00
0.00
0.0
0.009
2.07
Final Element Output
SRD = 115.44 kips
Element
Time Step for Maximum Compressive Stress
Maximum Compressive Stress, ksi
Time Step for Maximum Tensile Stress
Maximum Tensile Stress, ksi
Maximum Deflection, in.
Final Deflection, in.
Final Velocity, ft/sec
1
183
2.90
592
0.00
0.818
0.277
-9.74
2
119
1.55
538
0.00
0.696
0.681
0.12
3
121
1.56
2
0.00
0.270
0.265
-0.02
4
123
1.56
3
0.00
0.270
0.265
-0.03
5
125
1.55
465
0.01
0.270
0.265
-0.02
6
127
1.55
467
0.05
0.270
0.265
-0.02
7
128
1.55
469
0.10
0.269
0.265
-0.02
8
130
1.55
471
0.14
0.269
0.265
-0.02
9
132
1.55
471
0.18
0.268
0.265
-0.01
10
134
1.55
473
0.22
0.268
0.265
-0.00
11
136
1.54
475
0.26
0.268
0.265
0.00
12
138
1.54
477
0.30
0.267
0.265
0.01
13
140
1.54
476
0.34
0.267
0.265
0.02
14
142
1.54
477
0.37
0.267
0.266
0.03
15
144
1.53
478
0.40
0.267
0.266
0.05
16
146
1.53
477
0.43
0.267
0.266
0.08
17
148
1.53
477
0.46
0.267
0.267
0.11
18
150
1.52
476
0.48
0.267
0.267
0.14
19
152
1.52
477
0.50
0.268
0.268
0.17
20
154
1.52
478
0.51
0.269
0.269
0.20
21
156
1.51
476
0.53
0.269
0.269
0.23
22
158
1.51
476
0.54
0.270
0.270
0.26
23
160
1.50
475
0.55
0.271
0.271
0.30
24
162
1.50
476
0.55
0.271
0.271
0.34
25
164
1.49
476
0.55
0.272
0.272
0.37
26
166
1.49
476
0.54
0.273
0.273
0.41
27
168
1.48
475
0.53
0.274
0.274
0.45
28
170
1.48
475
0.51
0.274
0.274
0.48
29
172
1.47
476
0.48
0.275
0.275
0.53
30
174
1.47
475
0.45
0.276
0.276
0.58
31
176
1.46
474
0.41
0.276
0.276
0.63
32
178
1.46
472
0.37
0.277
0.277
0.68
33
180
1.45
471
0.32
0.278
0.278
0.71
34
182
1.44
472
0.28
0.278
0.278
0.72
35
184
1.43
466
0.23
0.278
0.278
0.72
36
185
1.42
516
0.24
0.279
0.279
0.70
37
186
1.41
524
0.26
0.279
0.279
0.65
38
188
1.40
529
0.28
0.279
0.279
0.58
39
190
1.38
532
0.31
0.279
0.279
0.51
40
192
1.37
533
0.34
0.279
0.279
0.44
41
194
1.36
542
0.38
0.279
0.279
0.38
42
196
1.35
541
0.42
0.279
0.279
0.33
43
198
1.33
544
0.45
0.279
0.279
0.28
44
200
1.32
543
0.49
0.279
0.279
0.23
45
203
1.31
542
0.52
0.279
0.279
0.18
46
205
1.30
545
0.55
0.278
0.278
0.12
47
207
1.28
544
0.58
0.278
0.278
0.08
48
209
1.27
542
0.60
0.277
0.277
0.03
49
211
1.26
544
0.63
0.277
0.277
-0.01
50
213
1.24
543
0.65
0.277
0.277
-0.05
51
216
1.23
542
0.67
0.276
0.276
-0.10
52
217
1.22
540
0.69
0.276
0.276
-0.14
53
218
1.22
539
0.69
0.277
0.275
-0.18
54
220
1.22
540
0.69
0.278
0.275
-0.22
55
222
1.22
539
0.69
0.279
0.274
-0.25
56
224
1.22
538
0.69
0.281
0.274
-0.28
57
226
1.22
538
0.68
0.282
0.274
-0.32
58
228
1.22
538
0.66
0.283
0.273
-0.36
59
230
1.22
537
0.65
0.285
0.273
-0.41
60
232
1.23
536
0.63
0.286
0.273
-0.46
61
235
1.23
534
0.60
0.287
0.273
-0.52
62
237
1.23
535
0.57
0.288
0.273
-0.56
63
239
1.23
533
0.54
0.290
0.273
-0.61
64
241
1.23
532
0.50
0.291
0.273
-0.63
65
244
1.23
530
0.46
0.292
0.273
-0.66
66
246
1.23
531
0.41
0.293
0.273
-0.69
67
248
1.23
531
0.35
0.294
0.273
-0.72
68
250
1.23
530
0.29
0.294
0.274
-0.74
69
253
1.23
532
0.23
0.295
0.274
-0.75
70
255
1.23
470
0.18
0.296
0.274
-0.75
71
253
1.23
474
0.21
0.296
0.275
-0.75
72
255
1.23
473
0.24
0.296
0.275
-0.75
73
257
1.23
476
0.27
0.296
0.276
-0.74
74
260
1.23
476
0.30
0.296
0.276
-0.74
75
262
1.23
478
0.33
0.296
0.277
-0.72
76
264
1.23
478
0.35
0.295
0.277
-0.71
77
266
1.23
480
0.38
0.295
0.278
-0.70
78
268
1.22
479
0.39
0.294
0.278
-0.68
79
271
1.22
478
0.41
0.294
0.279
-0.66
80
273
1.22
480
0.43
0.293
0.279
-0.65
81
275
1.21
478
0.44
0.292
0.280
-0.64
82
277
1.21
477
0.46
0.292
0.280
-0.62
83
279
1.20
479
0.47
0.291
0.281
-0.60
84
280
1.19
477
0.48
0.290
0.282
-0.58
85
279
1.18
474
0.49
0.290
0.282
-0.55
86
280
1.17
474
0.50
0.289
0.283
-0.53
87
281
1.15
476
0.50
0.289
0.284
-0.51
88
281
1.12
469
0.51
0.288
0.284
-0.48
89
280
1.10
471
0.51
0.288
0.285
-0.45
90
281
1.06
471
0.51
0.288
0.285
-0.42
91
281
1.02
472
0.50
0.288
0.286
-0.40
92
280
0.97
473
0.49
0.288
0.287
-0.37
93
281
0.92
474
0.46
0.288
0.287
-0.34
94
282
0.87
474
0.42
0.288
0.288
-0.30
95
283
0.81
475
0.37
0.289
0.288
-0.27
96
282
0.75
476
0.31
0.289
0.289
-0.25
97
283
0.68
478
0.25
0.289
0.289
-0.23
98
289
0.62
480
0.19
0.289
0.289
-0.21
99
294
0.56
482
0.12
0.290
0.290
-0.19
100
302
0.51
485
0.07
0.290
0.290
-0.17
101
307
0.47
489
0.02
0.290
0.290
-0.15
102
316
0.46
532
0.00
0.290
0.290
-0.12
Force-Time History, SRD = 115.44 kips Blue Line = Pile Head Force Red Line = Pile Head Impedance*Velocity Vertical grid spacing from left to right is L/c, may not be complete for last spacing. Plot Limits: x-axis from 0.000 to 2.955 y-axis from -68,985.344 to 223,926.386
Summary of Results and Bearing Graph Data
Soil Resistance, kips
Permanent Set of Pile Toe, inches
Blows per Foot of Penetration
Maximum Compressive Stress, ksi
Element of Maximum Compressive Stress
Maximum Tensile Stress, ksi
Element of Maximum Tensile Stress
Number of Iterations
23.1 (45.3)
1.541
7.8
1.53
4
1.21
24
2000
46.2 (90.7)
0.744
16.1
1.54
4
1.05
54
1149
69.3 (136.0)
0.494
24.3
1.54
4
0.97
54
872
92.3 (181.3)
0.349
34.4
1.55
4
0.86
54
740
115.4 (226.7)
0.281
42.7
1.56
4
0.69
54
592
138.5 (272.0)
0.228
52.6
1.58
3
0.52
56
588
161.6 (317.3)
0.184
65.2
1.61
3
0.30
92
480
184.7 (362.7)
0.144
83.3
1.64
3
0.20
94
477
207.8 (408.0)
0.108
111.1
1.67
4
0.11
95
474
230.9 (453.3)
0.077
155.4
1.70
4
0.07
92
471
The bearing graph data is complete. The only difference with the cohesionless soils is the way the soil resistance is reported; the values in parentheses are ultimate resistance without set-up and those outside are the SRD with set-up. The blow count indicates that a smaller hammer may be in order.
General Output for Wave Equation Analysis
2018-01-06T10:13:03-05:00
Time Step, msec
0.04024
Pile Weight, lbs.
15,000
Pile Stiffness, lb/ft
600,000
Pile Impedance, lb-sec/ft
57,937.5
L/c, msec
8.04688
Pile Toe Element Number
102
Length of Pile Segments, ft.
1
Hammer Manufacturer and Size
VULCAN O16
Hammer Rated Striking Energy, ft-lbs
48750
Hammer Efficiency, percent
67
Length of Hammer Cushion Stack, in.
16.5
Soil Resistance to Driving (SRD) for detailed results only, kips
572.7
Percent at Toe
35.39
Toe Quake, in.
0.220
Toe Damping, sec/ft
0.07
For those familiar with the wave equation, there are few surprises. Some explanation of the parameters can be found with the documentation for the TTI program.
Initial Element Output
SRD = 572.68 kips
Element
Element Weight, lbs.
Element Stiffness, kips/in
Element Cross-Sectional Area, in2
Element Soil Resistance, kips
Element Coefficient of Restitution
Element Initial Velocity, ft/sec
Element Soil Shaft Stiffness, kips/in
Element Quake, in.
Element Damping, sec/ft
Ram
16,250.0
4,957.5
233.71
0.0
0.80
11.37
0.0
1,000.000
0.00
Driving Accessory
3,800.0
711.5
144.00
0.0
0.51
0.00
0.0
1,000.000
0.00
Pile Head
150.0
60,000.0
144.00
0.0
1.00
0.00
16.1
0.002
45.39
4
150.0
60,000.0
144.00
0.1
1.00
0.00
28.0
0.004
19.91
5
150.0
60,000.0
144.00
0.2
1.00
0.00
36.1
0.005
13.57
6
150.0
60,000.0
144.00
0.3
1.00
0.00
42.7
0.006
10.54
7
150.0
60,000.0
144.00
0.3
1.00
0.00
48.4
0.007
8.73
8
150.0
60,000.0
144.00
0.4
1.00
0.00
53.5
0.007
7.51
9
150.0
60,000.0
144.00
0.5
1.00
0.00
58.2
0.008
6.62
10
150.0
60,000.0
144.00
0.5
1.00
0.00
62.5
0.009
5.95
11
150.0
60,000.0
144.00
0.6
1.00
0.00
66.6
0.009
5.41
12
150.0
60,000.0
144.00
0.7
1.00
0.00
70.4
0.010
4.98
13
150.0
60,000.0
144.00
0.8
1.00
0.00
74.0
0.010
4.62
14
150.0
60,000.0
144.00
0.8
1.00
0.00
77.4
0.011
4.31
15
150.0
60,000.0
144.00
0.9
1.00
0.00
80.7
0.011
4.05
16
150.0
60,000.0
144.00
1.0
1.00
0.00
83.9
0.012
3.82
17
150.0
60,000.0
144.00
1.0
1.00
0.00
87.0
0.012
3.62
18
150.0
60,000.0
144.00
1.1
1.00
0.00
89.9
0.012
3.44
19
150.0
60,000.0
144.00
1.2
1.00
0.00
92.8
0.013
3.28
20
150.0
60,000.0
144.00
1.3
1.00
0.00
95.6
0.013
3.14
21
150.0
60,000.0
144.00
1.3
1.00
0.00
98.3
0.014
3.01
22
150.0
60,000.0
144.00
1.4
1.00
0.00
100.9
0.014
2.89
23
150.0
60,000.0
144.00
1.5
1.00
0.00
103.5
0.014
2.79
24
150.0
60,000.0
144.00
1.5
1.00
0.00
106.0
0.015
2.69
25
150.0
60,000.0
144.00
1.6
1.00
0.00
108.4
0.015
2.60
26
150.0
60,000.0
144.00
1.7
1.00
0.00
110.8
0.015
2.51
27
150.0
60,000.0
144.00
1.8
1.00
0.00
113.1
0.016
2.43
28
150.0
60,000.0
144.00
1.8
1.00
0.00
115.4
0.016
2.36
29
150.0
60,000.0
144.00
1.9
1.00
0.00
117.7
0.016
2.29
30
150.0
60,000.0
144.00
2.0
1.00
0.00
119.9
0.017
2.23
31
150.0
60,000.0
144.00
2.1
1.00
0.00
122.1
0.017
2.17
32
150.0
60,000.0
144.00
2.1
1.00
0.00
124.2
0.017
2.11
33
150.0
60,000.0
144.00
2.2
1.00
0.00
126.3
0.017
2.06
34
150.0
60,000.0
144.00
2.3
1.00
0.00
128.4
0.018
2.01
35
150.0
60,000.0
144.00
2.4
1.00
0.00
130.4
0.018
1.96
36
150.0
60,000.0
144.00
2.4
1.00
0.00
132.5
0.018
1.91
37
150.0
60,000.0
144.00
2.5
1.00
0.00
134.4
0.019
1.87
38
150.0
60,000.0
144.00
2.6
1.00
0.00
136.4
0.019
1.83
39
150.0
60,000.0
144.00
2.7
1.00
0.00
138.3
0.019
1.79
40
150.0
60,000.0
144.00
2.7
1.00
0.00
140.2
0.019
1.75
41
150.0
60,000.0
144.00
2.8
1.00
0.00
142.1
0.020
1.72
42
150.0
60,000.0
144.00
2.9
1.00
0.00
144.0
0.020
1.68
43
150.0
60,000.0
144.00
3.0
1.00
0.00
145.8
0.020
1.65
44
150.0
60,000.0
144.00
3.0
1.00
0.00
147.7
0.021
1.62
45
150.0
60,000.0
144.00
3.1
1.00
0.00
149.5
0.021
1.59
46
150.0
60,000.0
144.00
3.2
1.00
0.00
151.3
0.021
1.56
47
150.0
60,000.0
144.00
3.3
1.00
0.00
153.0
0.021
1.53
48
150.0
60,000.0
144.00
3.3
1.00
0.00
154.8
0.022
1.50
49
150.0
60,000.0
144.00
3.4
1.00
0.00
156.5
0.022
1.48
50
150.0
60,000.0
144.00
3.5
1.00
0.00
158.3
0.022
1.45
51
150.0
60,000.0
144.00
3.6
1.00
0.00
160.0
0.022
1.43
52
150.0
60,000.0
144.00
3.7
1.00
0.00
161.7
0.023
1.40
53
150.0
60,000.0
144.00
3.7
1.00
0.00
163.0
0.023
1.38
54
150.0
60,000.0
144.00
3.8
1.00
0.00
164.1
0.023
1.37
55
150.0
60,000.0
144.00
3.8
1.00
0.00
165.2
0.023
1.35
56
150.0
60,000.0
144.00
3.9
1.00
0.00
166.2
0.023
1.34
57
150.0
60,000.0
144.00
4.0
1.00
0.00
167.3
0.024
1.32
58
150.0
60,000.0
144.00
4.0
1.00
0.00
168.4
0.024
1.31
59
150.0
60,000.0
144.00
4.1
1.00
0.00
169.4
0.024
1.29
60
150.0
60,000.0
144.00
4.1
1.00
0.00
170.5
0.024
1.28
61
150.0
60,000.0
144.00
4.2
1.00
0.00
171.6
0.024
1.27
62
150.0
60,000.0
144.00
4.2
1.00
0.00
172.6
0.025
1.25
63
150.0
60,000.0
144.00
4.3
1.00
0.00
173.7
0.025
1.24
64
150.0
60,000.0
144.00
4.4
1.00
0.00
174.8
0.025
1.22
65
150.0
60,000.0
144.00
4.4
1.00
0.00
175.8
0.025
1.21
66
150.0
60,000.0
144.00
4.5
1.00
0.00
176.9
0.025
1.20
67
150.0
60,000.0
144.00
4.6
1.00
0.00
178.0
0.026
1.18
68
150.0
60,000.0
144.00
4.6
1.00
0.00
179.0
0.026
1.17
69
150.0
60,000.0
144.00
4.7
1.00
0.00
180.1
0.026
1.16
70
150.0
60,000.0
144.00
4.8
1.00
0.00
181.2
0.026
1.14
71
150.0
60,000.0
144.00
4.8
1.00
0.00
182.3
0.026
1.13
72
150.0
60,000.0
144.00
4.9
1.00
0.00
183.4
0.027
1.12
73
150.0
60,000.0
144.00
5.0
1.00
0.00
184.5
0.027
1.10
74
150.0
60,000.0
144.00
5.0
1.00
0.00
185.6
0.027
1.09
75
150.0
60,000.0
144.00
5.1
1.00
0.00
186.7
0.027
1.08
76
150.0
60,000.0
144.00
5.2
1.00
0.00
187.8
0.028
1.06
77
150.0
60,000.0
144.00
5.3
1.00
0.00
189.0
0.028
1.05
78
150.0
60,000.0
144.00
5.4
1.00
0.00
190.1
0.028
1.04
79
150.0
60,000.0
144.00
5.5
1.00
0.00
191.2
0.029
1.03
80
150.0
60,000.0
144.00
5.5
1.00
0.00
192.4
0.029
1.01
81
150.0
60,000.0
144.00
5.6
1.00
0.00
193.6
0.029
1.00
82
150.0
60,000.0
144.00
5.7
1.00
0.00
194.8
0.029
0.99
83
150.0
60,000.0
144.00
5.8
1.00
0.00
196.0
0.030
0.97
84
150.0
60,000.0
144.00
5.9
1.00
0.00
197.2
0.030
0.96
85
150.0
60,000.0
144.00
6.0
1.00
0.00
198.4
0.030
0.95
86
150.0
60,000.0
144.00
6.1
1.00
0.00
199.6
0.031
0.93
87
150.0
60,000.0
144.00
6.2
1.00
0.00
200.9
0.031
0.92
88
150.0
60,000.0
144.00
6.3
1.00
0.00
202.2
0.031
0.90
89
150.0
60,000.0
144.00
6.5
1.00
0.00
203.5
0.032
0.89
90
150.0
60,000.0
144.00
6.6
1.00
0.00
204.8
0.032
0.88
91
150.0
60,000.0
144.00
6.7
1.00
0.00
206.1
0.033
0.86
92
150.0
60,000.0
144.00
6.8
1.00
0.00
207.5
0.033
0.85
93
150.0
60,000.0
144.00
7.0
1.00
0.00
208.9
0.033
0.84
94
150.0
60,000.0
144.00
7.1
1.00
0.00
210.3
0.034
0.82
95
150.0
60,000.0
144.00
7.3
1.00
0.00
211.7
0.034
0.81
96
150.0
60,000.0
144.00
7.4
1.00
0.00
213.2
0.035
0.79
97
150.0
60,000.0
144.00
7.6
1.00
0.00
214.7
0.035
0.78
98
150.0
60,000.0
144.00
7.7
1.00
0.00
216.3
0.036
0.77
99
150.0
60,000.0
144.00
7.9
1.00
0.00
217.8
0.036
0.75
100
150.0
60,000.0
144.00
8.1
1.00
0.00
219.4
0.037
0.74
101
150.0
60,000.0
144.00
8.3
1.00
0.00
221.1
0.038
0.72
102
150.0
922.6
144.00
8.5
1.00
0.00
222.8
0.038
0.71
Pile Toe
0.0
922.6
144.00
202.7
0.00
0.00
0.0
0.220
0.07
A detailed output of the parameters for each segment/element. TAMWAVE no longer uses the simplifications used in the past for resistance distribution along the shaft, i.e., uniform, triangular, etc., but constructs one based on the soil properties. Much of this data is repeated from the static analysis.
Final Element Output
SRD = 572.68 kips
Element
Time Step for Maximum Compressive Stress
Maximum Compressive Stress, ksi
Time Step for Maximum Tensile Stress
Maximum Tensile Stress, ksi
Maximum Deflection, in.
Final Deflection, in.
Final Velocity, ft/sec
1
50
3.70
164
0.00
1.299
1.299
-0.11
2
176
2.64
1
0.00
1.300
1.261
-2.56
3
178
2.64
2
0.00
0.650
0.646
-1.01
4
180
2.65
3
0.00
0.646
0.643
-0.93
5
182
2.66
4
0.00
0.641
0.639
-0.85
6
184
2.66
5
0.00
0.637
0.635
-0.78
7
186
2.67
6
0.00
0.632
0.631
-0.70
8
187
2.67
7
0.00
0.628
0.627
-0.62
9
190
2.68
8
0.00
0.623
0.622
-0.53
10
192
2.69
9
0.00
0.619
0.618
-0.45
11
194
2.69
10
0.00
0.614
0.613
-0.37
12
196
2.69
11
0.00
0.609
0.609
-0.30
13
198
2.70
12
0.00
0.604
0.604
-0.22
14
359
2.71
13
0.00
0.599
0.599
-0.14
15
361
2.72
14
0.00
0.594
0.594
-0.06
16
363
2.73
15
0.00
0.588
0.588
0.01
17
365
2.74
16
0.00
0.583
0.583
0.07
18
367
2.75
17
0.00
0.578
0.578
0.13
19
369
2.75
18
0.00
0.572
0.572
0.19
20
372
2.76
19
0.00
0.567
0.567
0.24
21
374
2.77
20
0.00
0.561
0.561
0.27
22
376
2.78
21
0.00
0.556
0.556
0.29
23
378
2.79
22
0.00
0.550
0.550
0.30
24
379
2.80
23
0.00
0.544
0.544
0.29
25
381
2.80
24
0.00
0.539
0.539
0.28
26
384
2.81
25
0.00
0.533
0.533
0.26
27
386
2.82
26
0.00
0.527
0.527
0.23
28
388
2.82
27
0.00
0.522
0.522
0.19
29
390
2.83
28
0.00
0.516
0.516
0.15
30
392
2.83
29
0.00
0.511
0.511
0.11
31
393
2.84
30
0.00
0.505
0.505
0.07
32
395
2.84
31
0.00
0.500
0.500
0.03
33
397
2.84
32
0.00
0.496
0.494
-0.01
34
399
2.84
33
0.00
0.491
0.489
-0.05
35
399
2.84
34
0.00
0.487
0.483
-0.08
36
400
2.84
35
0.00
0.483
0.478
-0.11
37
401
2.83
36
0.00
0.479
0.473
-0.14
38
400
2.82
37
0.00
0.474
0.468
-0.17
39
401
2.81
38
0.00
0.470
0.463
-0.19
40
400
2.80
39
0.00
0.466
0.457
-0.21
41
401
2.78
40
0.00
0.462
0.452
-0.24
42
399
2.76
41
0.00
0.458
0.447
-0.26
43
400
2.74
42
0.00
0.454
0.442
-0.27
44
399
2.71
43
0.00
0.449
0.437
-0.29
45
398
2.68
44
0.00
0.445
0.432
-0.30
46
397
2.65
45
0.00
0.441
0.427
-0.31
47
267
2.64
46
0.00
0.437
0.422
-0.32
48
270
2.64
47
0.00
0.433
0.417
-0.33
49
272
2.63
48
0.00
0.429
0.412
-0.33
50
275
2.62
49
0.00
0.425
0.407
-0.34
51
277
2.61
50
0.00
0.420
0.402
-0.34
52
279
2.60
51
0.00
0.416
0.397
-0.35
53
282
2.59
52
0.00
0.412
0.393
-0.35
54
284
2.58
53
0.00
0.407
0.388
-0.36
55
283
2.57
54
0.00
0.403
0.383
-0.36
56
286
2.56
55
0.00
0.398
0.378
-0.36
57
288
2.55
56
0.00
0.393
0.373
-0.36
58
290
2.54
57
0.00
0.389
0.368
-0.36
59
293
2.53
58
0.00
0.384
0.363
-0.36
60
295
2.52
59
0.00
0.379
0.358
-0.35
61
298
2.51
60
0.00
0.374
0.353
-0.35
62
300
2.50
61
0.00
0.368
0.349
-0.35
63
303
2.49
62
0.00
0.363
0.344
-0.35
64
301
2.47
63
0.00
0.358
0.339
-0.34
65
304
2.46
64
0.00
0.352
0.334
-0.34
66
306
2.45
65
0.00
0.347
0.329
-0.33
67
309
2.44
66
0.00
0.341
0.324
-0.32
68
311
2.43
67
0.00
0.336
0.319
-0.32
69
478
2.42
68
0.00
0.330
0.315
-0.31
70
480
2.43
69
0.00
0.324
0.310
-0.31
71
479
2.44
70
0.00
0.319
0.305
-0.30
72
481
2.44
71
0.00
0.313
0.300
-0.29
73
482
2.44
72
0.00
0.307
0.296
-0.29
74
481
2.43
73
0.00
0.302
0.291
-0.28
75
482
2.42
74
0.00
0.296
0.286
-0.28
76
480
2.40
75
0.00
0.290
0.282
-0.27
77
482
2.38
76
0.00
0.285
0.277
-0.26
78
479
2.35
77
0.00
0.280
0.273
-0.26
79
482
2.32
78
0.00
0.274
0.269
-0.25
80
483
2.28
79
0.00
0.269
0.264
-0.25
81
481
2.25
80
0.00
0.264
0.260
-0.24
82
483
2.21
81
0.00
0.259
0.256
-0.24
83
485
2.17
82
0.00
0.255
0.252
-0.23
84
483
2.13
83
0.00
0.250
0.248
-0.22
85
485
2.09
84
0.00
0.246
0.244
-0.21
86
487
2.05
85
0.00
0.241
0.240
-0.20
87
490
2.00
86
0.00
0.237
0.236
-0.19
88
487
1.95
87
0.00
0.233
0.232
-0.18
89
489
1.91
88
0.00
0.229
0.229
-0.18
90
492
1.86
89
0.00
0.226
0.225
-0.17
91
489
1.80
90
0.00
0.222
0.221
-0.16
92
492
1.75
91
0.00
0.218
0.218
-0.15
93
495
1.69
92
0.00
0.215
0.215
-0.15
94
497
1.63
93
0.00
0.212
0.211
-0.14
95
494
1.57
94
0.00
0.208
0.208
-0.15
96
497
1.51
95
0.00
0.205
0.205
-0.14
97
506
1.45
96
0.00
0.202
0.202
-0.15
98
508
1.39
97
0.00
0.199
0.199
-0.13
99
517
1.33
98
0.00
0.196
0.196
-0.16
100
521
1.28
99
0.00
0.193
0.193
-0.14
101
529
1.23
100
0.00
0.190
0.190
-0.15
102
532
1.24
101
0.00
0.188
0.187
-0.12
This table shows the end results of the run for the “target” SRD of the pile. “SRD” is “soil resistance to driving,” and in TAMWAVE for cohesionless soils, SRD and the ultimate capacity are the same. That’s not the case with cohesive soils, as we will see. In any case TAMWAVE always does a “bearing graph” analysis, which proportionally varies the SRD and obtains different results for the blow count, maximum tensile and compressive stresses. The bearing graph method isn’t perfect but it’s probably the best way we have to account for varying site conditions and to make judgments about the effect of those on our hammer selection.
The adoption of “Smith-type” damping was originally done for comparison purposes but for bearing graph analysis has one important advantages: it varies the soil radiation damping with the SRD, which is more realistic than just assuming fixed damping.
The table above only appears if the target SRD is actually achieved during bearing graph analysis. If it doesn’t come up, the bearing graph analysis could not achieve net pile penetration at the target SRD, which means you need to revisit your hammer selection.
Force-Time History, SRD = 572.68 kips Blue Line = Pile Head Force Red Line = Pile Head Impedance*Velocity Vertical grid spacing from left to right is L/c, may not be complete for last spacing. Plot Limits: x-axis from 0.000 to 2.740 y-axis from -58,477.768 to 380,602.674
Here we see the second graphical output: the force-time history at the target SRD. There are actually two histories: the actual pile head force (blue) and the pile head velocity multiplied by the impedance (red.) For semi-infinite piles, the two should be the same; they will differ for actual finite piles, as is easily seen. Although a “semi-infinite pile” may seem a very theoretical concept, the relationship of the two plots is very important in the field application of pile dynamics.
Summary of Results and Bearing Graph Data
Soil Resistance, kips
Permanent Set of Pile Toe, inches
Blows per Foot of Penetration
Maximum Compressive Stress, ksi
Element of Maximum Compressive Stress
Maximum Tensile Stress, ksi
Element of Maximum Tensile Stress
Number of Iterations
114.5
1.707
7.0
2.61
30
0.67
43
1590
229.1
0.754
15.9
2.64
29
0.20
25
1124
343.6
0.355
33.8
2.67
28
0.00
102
719
458.1
0.111
108.2
2.71
32
0.00
102
567
572.7
0.000
0.0
2.84
34
0.00
102
549
The final results are shown here. In this case, at the target SRD, no permanent set of the pile is recorded. It will be necessary to vary the size of the hammer, being mindful of the stresses (whose allowable values are described here.)
At this point the analysis of this pile is complete. The program gives you the choice of simply trying another hammer or starting over. The latter is what we will do next with a sample case for cohesive soils.


 , the excess pore water pressures that affect the effective stress (which in turn determine the shaft friction) are computed by the equation
, the excess pore water pressures that affect the effective stress (which in turn determine the shaft friction) are computed by the equation

 , where
, where  , was chosen.
, was chosen.