
With the successful transition of the 
One of the things that makes STADYN more complex than either TAMWAVE or most other 1-D solutions is that soils are not considered as purely cohesive or cohesionless. In most analysis of driven piles, soils are either on or the other, or at best alternately layered. In reality the division between the two is not so clear-cut except for either clean sands on the one end or pure clays on the other. STADYN’s soil system envisions soils as a continuum between one and the other; although this adds to the flexibility of the program (especially in the inverse mode) and its modelling of reality, it makes specifying soils a challenge.
As noted earlier, for soils between the purely cohesionless (



Cohesionless soils: there are two ways of looking at this problem. We can assume a straight-up Coulomb friction failure between the pile and soil, or we can assume that the pile acts as a “direct shear” tester and thus forces the soil to fail at an apparent angle that is not the same as would be predicted by Mohr-Coulomb failure. As with TAMWAVE, we have assumed the latter; this is explained in some detail here. It is reasonable to assume that a continuum model such as is used by STADYN could predict such a failure; thus, no modification to the elements closest to the pile surface is done for cohesionless soils.
One thing that did change, however, was the way the lateral earth pressure on the pile was computed. In an elastic-purely plastic system, lateral earth pressure varies in the elastic region, and with elastic theory that means with the variance of Poisson’s Ratio. With a Mohr-Coulomb failure criterion, frictional cohesionless soils’ strength is mobilised by vertical effective stress acting laterally. In recent code iterations Jaky’s Equation has been used to estimate Poisson’s Ratio; however, this has been changed to use the method given by Randolph, Dolwin and Beck (1994). Once the lateral earth pressure coefficient is computed using this method, Poisson’s Ratio is determined. At or below the pile toe Jaky’s Equation is used.
Cohesive soils: Mohr-Coulomb theory has no way of taking degradation of cohesion at an adhesion surface into account. To do this the cohesion for the element(s) immediately adjacent to the pile is reduced by an 
Implementing this is a little tricky, because the
Results: Finno (1989) and Modello and Killingsworth (2014) Comparisons
The results of these two cases were most recently discussed here. They can be discussed easily because the results varied little from the previous stage of the program.
For the first case, the Davisson capacity changed from 971 kN to 965 kN and the blow count from 17.6 to 15.8 blows/30 cm.
For the second (inverse) case, the Davisson capacity for the case of 
In both cases the soils were heavily cohesionless (at least that’s the way the pile looked at them) and the reduction in adhesion was minimal in impact.
Results: Notional Southeast Asia Case
Of all the test cases in the original study, the notional Southeast Asia case was the most problematic in the results, especially as they were compared to the GRLWEAP output. The previous phase produced little difference in outcome; it was hoped that applying
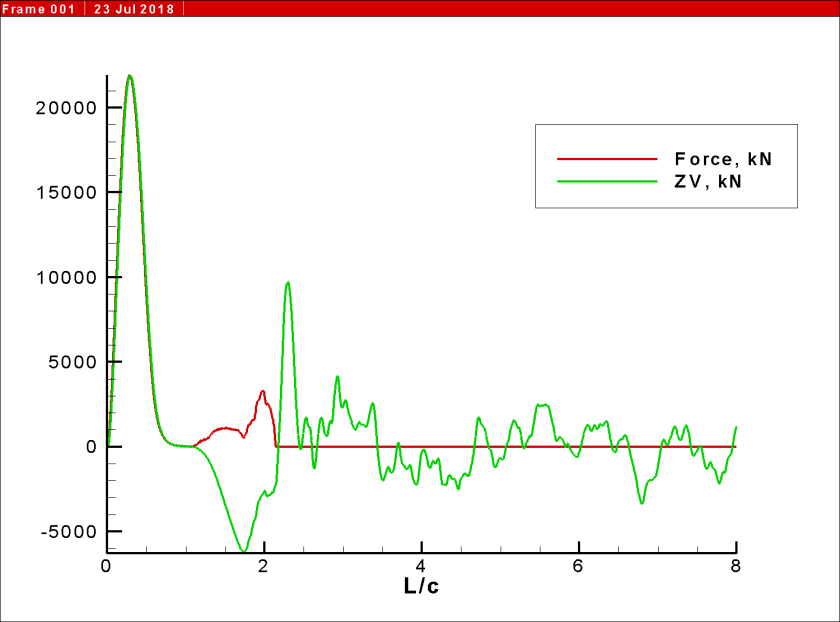
Since we have not presented too many results from this case, some graphical output is in order. First, the force-time and velocity*impedance-time curves:
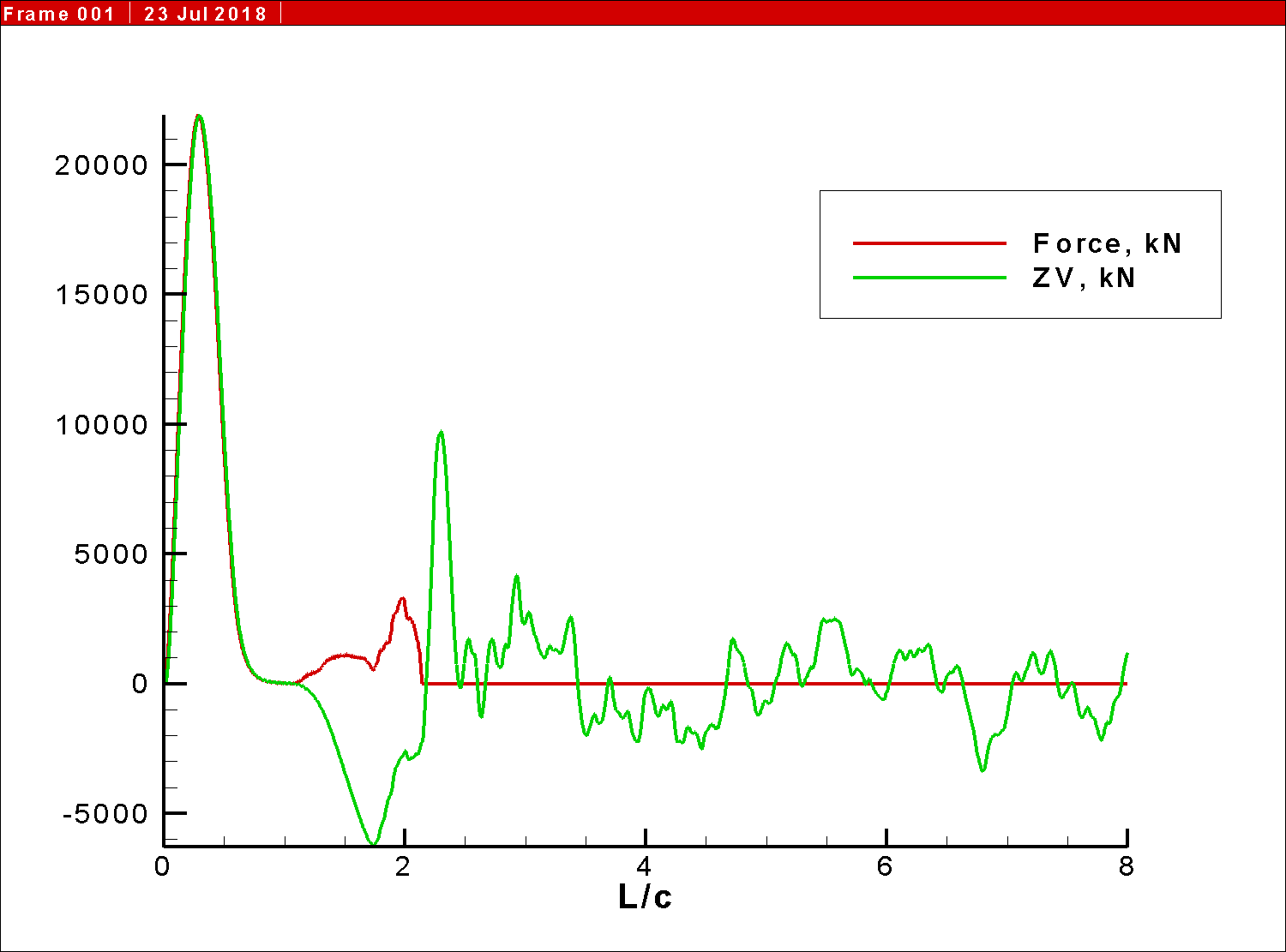
The result above is a classic “offshore” pattern. In the early part of impact (

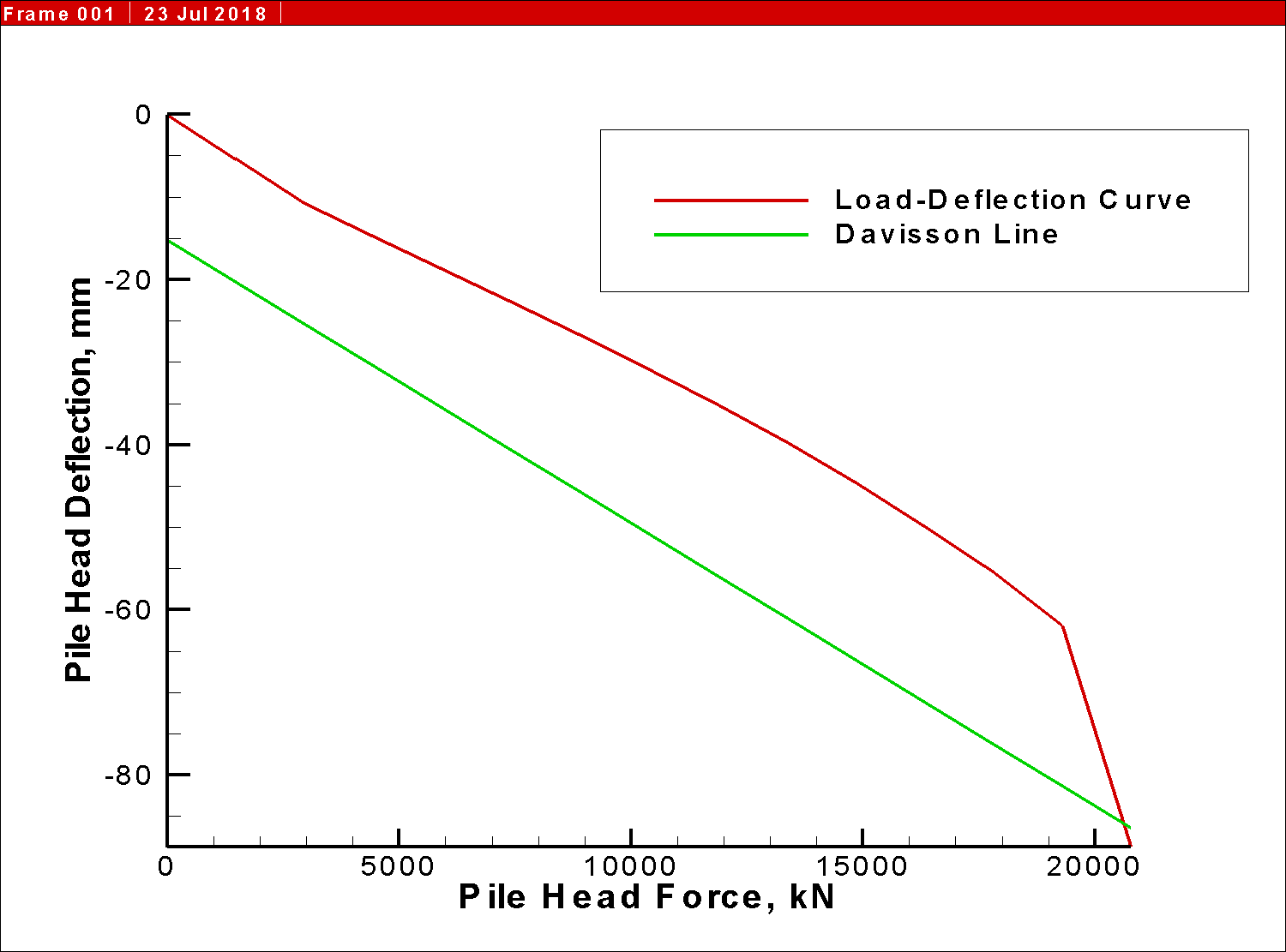
Now we have the result of the static load test. As noted in the original study, static load tests are exceptional offshore, and for actual loading a tension test is probably of just as much interest (if not more) than a compressive one. In the original study doubt was also expressed as to the relevance of Davisson’s criterion to offshore piles; the variation among different interpretation methods, however, were not that great. In any case, the effect of reducing the adhesion of cohesive soils along the surface is evident: the Davisson ultimate load has dropped to 20,600 kN. This is nearly identical to the Dennis and Olson (1983) method result, and below the API RP2A (2002) result. This indicates that the application of the
For the Dennis and Olson (1983) SRD, the GRLWEAP blow count varied from 18.4 blows/30 cm to 21.8 blows/30 cm, depending upon which value of damping was used (

- STADYN is modelling a lower effective damping value for the soils than is used in GRLWEAP. As noted in the original study, STADYN has a different model for handing dissipative phenomena than GRLWEAP.
- The two programs have differing methods for arriving at the blow count.
Before we can make more definitive statements about this, we need to include cushion losses, which is our next step. Nevertheless this result clears up a great deal of the difficulty with this case in the original study.

 to reflect changes in the meaning of
to reflect changes in the meaning of 
 to
to 
 . If extended past the bounds of the graph for lower values of
. If extended past the bounds of the graph for lower values of 
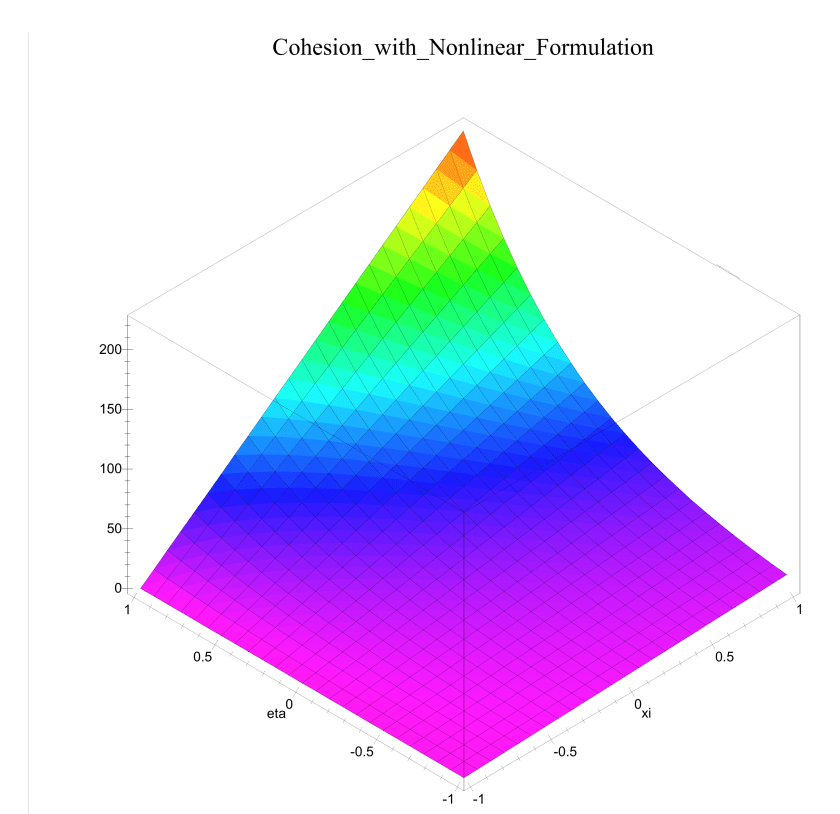
 is the soil cohesion and
is the soil cohesion and  is the atmospheric pressure. The left hand side of the equation is the “normalised” cohesion using the atmospheric pressure. Doing this for parameters such as effective stress makes for an interesting look at soil properties. The best known use of this is in the SPT correction for overburden.
is the atmospheric pressure. The left hand side of the equation is the “normalised” cohesion using the atmospheric pressure. Doing this for parameters such as effective stress makes for an interesting look at soil properties. The best known use of this is in the SPT correction for overburden. , the value can be reduced linearly so that
, the value can be reduced linearly so that  when
when  . The result of all this can be seen in the graph below.
. The result of all this can be seen in the graph below.


 .
.
 :
:
 at
at  at
at 


