Of all the topics I taught in my course on foundation design and analysis, my favourite topic was driven piles. I have taken this part of the course and am presenting it on the companion site vulcanhammer.info. The topics are as follows:
In putting this together, I added some material, including a different example problem and actual runs of axial and lateral load software, along with the wave equation analysis.
I trust that you will find this enjoyable and profitable.
The impulse–response (IR) test is the most commonly used field procedure for assessing the structural integrity of piles embedded in soil. The IR test uses the response of the pile to waves induced by an impulse load applied at the pile head in order to assess the condition of the pile. However, due to the contact between the pile and the soil, the recorded response at the pile head carries information not only about the pile, but about the soil as well, thus creating the as-yet-unexplored opportunity to characterize the properties of the surrounding soil. In effect, such dual use of the IR test data renders piles into probes for characterizing the near-surface soil deposits and/or soil erosion along the pile–soil interface. In this article, we discuss a systematic full-waveform-based inversion methodology that allows imaging of the soil surrounding a pile using conventional IR test data. We adopt a heterogeneous Winkler model to account for the effect of the soil on the pile’s response, and the pile’s end is assumed to be elastically supported, thus also accounting for the underlying soil. We appeal to a partial differential equation (PDE)-constrained-optimization approach, where we seek to minimize the misfit between the recorded time-domain response at the pile head (the IR data), and the response due to trial distributions of the spatially varying soil stiffness, subject to the coupled pile–soil wave propagation physics. We report numerical experiments involving layered soil profiles for piles founded on either soft or stiff soil, where the inversion methodology successfully characterizes the soil.
Over the years I have been looking at many different aspects of the problem of pile dynamics, which includes both prediction of drivability of piles and the inverse problem of estimating the static resistance of piles based on their performance during driving. In the course of working with all of this many ideas have come to mind; two of those are as follows:
Is it possible to use the pile hammer as a geotechnical sounding tool to determine the properties of soil layers into which the pile is being driven? In Improved Methods for Forward and Inverse Solution of the Wave Equation for Piles the soil at any given point was defined by the “Mohr-Coulomb triple” (unit weight, internal friction angle and cohesion) along with other properties, which is the point for most soil testing. The inverse method returned those properties.
The present paper does some interesting things to get to those solutions but ultimately doesn’t quite get to reaching a solution to these problems.
The Strong Point
Probably the strongest point of the paper is the entire mathematical presentation, from the development of the method to its execution. It shows computational proficiency of a high order. For example, it is the first time in pile dynamics that I have seen the use of the conjugate gradient technique. As the product of a PhD program with a heavy emphasis on computational fluid mechanics, this technique was well familiar to me (along with GMRES, which was the method of choice for my colleagues.) One of the challenges the geotechnical industry faces moving forward is the proper application of numerical techniques to geotechnical problems which are non-linear in ways which are unknown in other fields. We have people who are specialists with the geomechanics and people who are specialists in numerical methods, but few are those who are proficient in both.
One thing I would like to mention is that my use of a polytope method–which had many drawbacks–was driven by the difficulties in optimising geotechnical problems. Those difficulties are caused largely by the existence of false minima and maxima in the solution. It is why we still see, for example, grid optimisation used for slope stability problems: the use of, say a Newton’s Method type of optimisation may easily result in finding a false minimum. Although I think the author’s techniques have great promise of solving these problems, it is something they will have to watch for moving forward.
The Soil Property Issue
Probably the greatest weakness of the paper is the way soil properties are characterised.
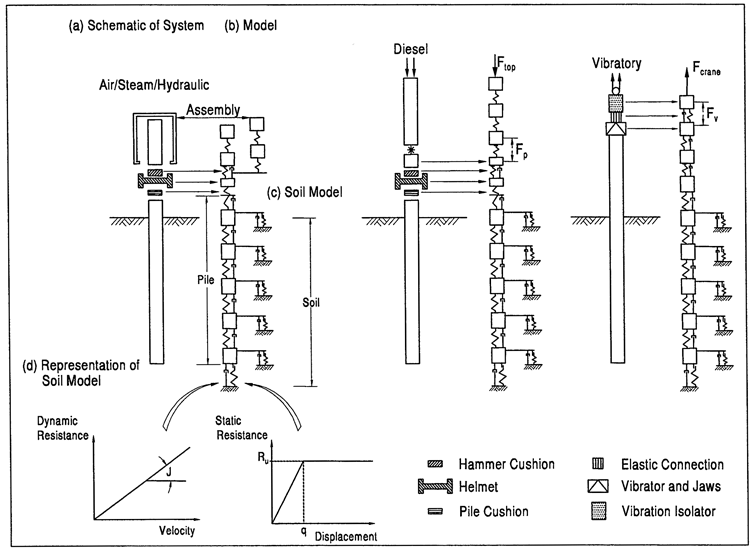
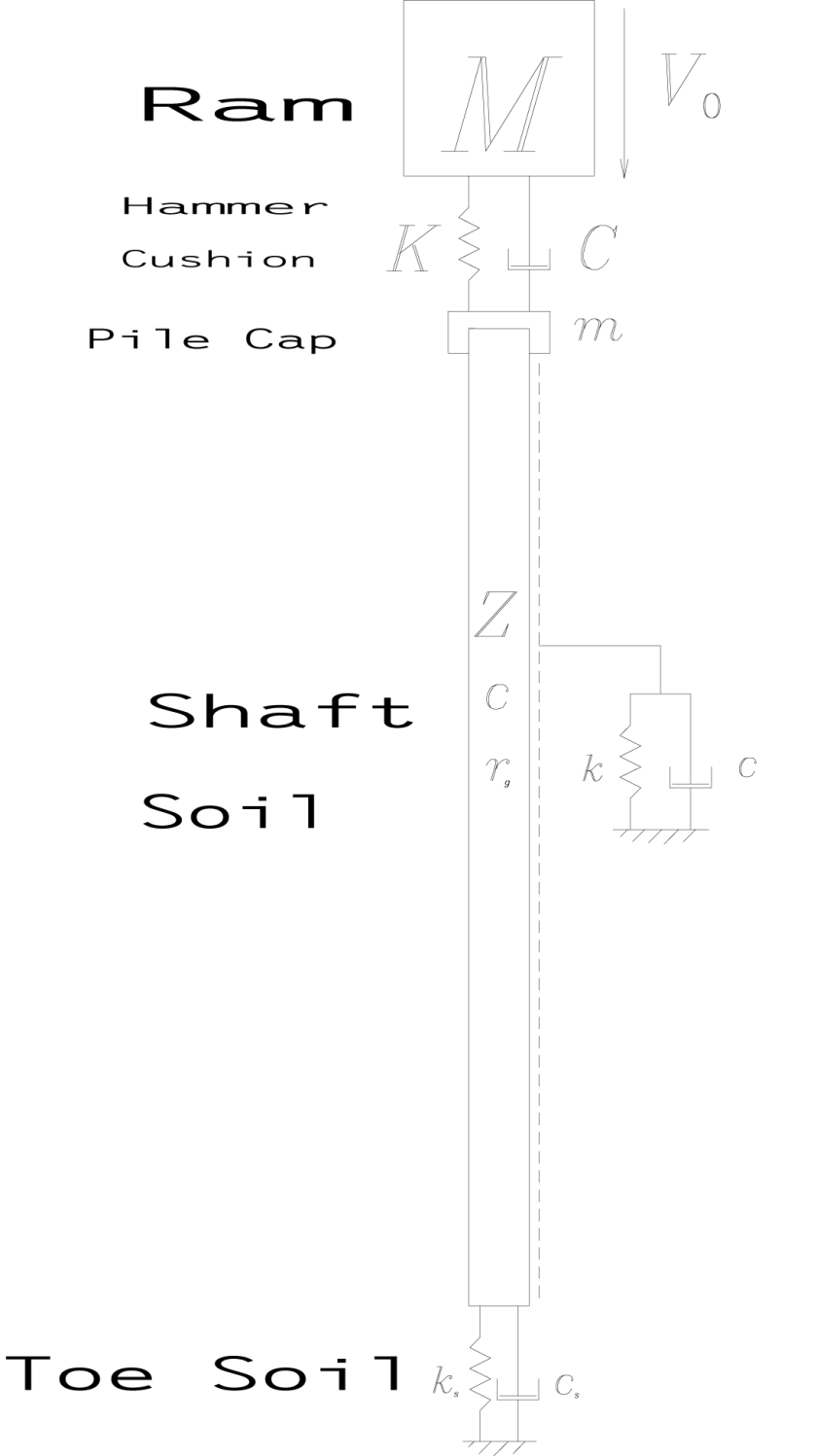
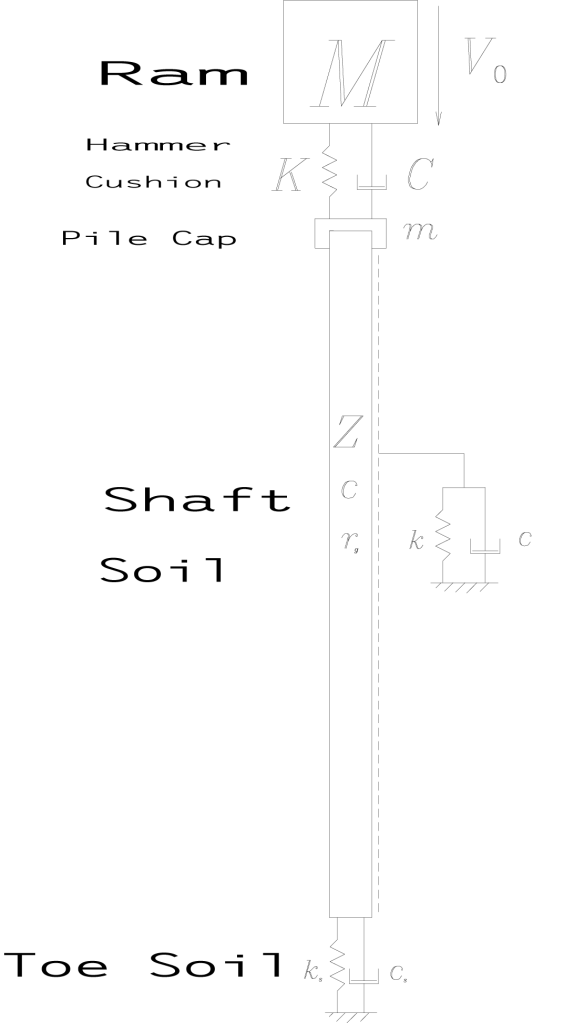
Simplified Hammer-Pile-Soil System (from Warrington (1997))
In this diagram the ram mass M impacts the cushion with a velocity Vo. There are several stiffnesses and damping coefficients k and c respectively. The accessory has a mass of m. The pile has an acoustic speed c, an impedance Z and a geometry ratio rg. For inverse analysis the hammer, cushion and driving accessory can be deleted and a force F(t) and velocity V(t) (both a function of time) substituted at the pile head.
The equation of motion u(x,t), which is a function of both the distance from the pile head x and time t, is given by the equation
(1)
The variables a and b are stiffness and damping related coefficients which are related to k and c by geometric and material property considerations, as discussed in Closed Form Solution of the Wave Equation for Piles.
Although the present paper allows for k(x), the one major difference between the governing equation presented above and the one in the paper is the omission of damping by the latter. (This omission is also repeated at the pile toe.) The soil damping is for the most part a representation of the propagation of wave energy from the pile as it is dynamically loaded. It is impossible to avoid in one form or another. First derivatives like that are always a danger in problems such as this. One way to get around that is to redistribute the damping into the spring and mass terms using Rayleigh damping. This is very frequency dependent and can be tricky to accurately apply; however, if it can be done successfully (and the authors’ note of wavespeed changes with soil interaction may be part of the solution) it would bypass the problems created by the first derivative. (The same comments regarding the shaft also apply at the toe, where an additional mass would have to be applied to achieve Rayleigh damping.)
But that doesn’t address what is, in some ways, the more serious issue: applying a linear model to a very non-linear problem. Concentrating on the shaft resistance, let us begin by noting the results in Estimating Load-Deflection Characteristics for the Shaft Resistance of Piles Using Hyperbolic Strain Softening, and stipulating that, even with hyperbolic stress-strain considerations, up to the time of separation between the shaft and the soil the load-deflection relationship is essentially linear. This study showed that, for the specific case in question, the geometric nonlinearity of the deflecting soil around the shaft and the material nonlinearlity of the soil offset each other to a large degree. Obviously more study needs to be done but this is a start.
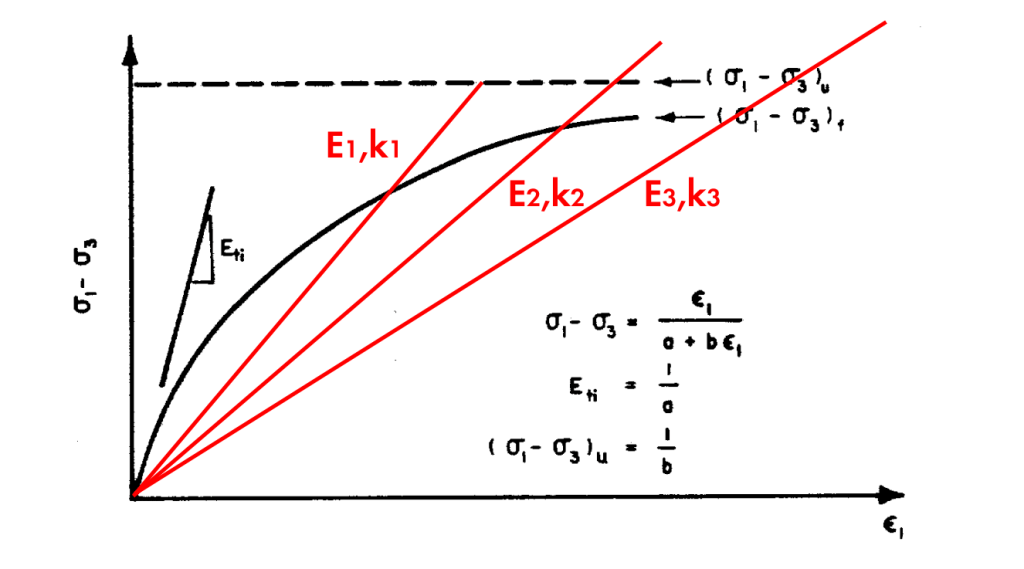
Having said that, let us look at a diagram I have used and modified over the years:
At zero strain we have the small strain elastic or shear modulus. As strain increases, if we use a linear model for load-deflection the only way the model can simulate that kind of response is to do some kind of “secant modulus” estimate. What this means is that the elastic modulus/shear modulus/spring constant is strain dependent, which will vary with loading condition (to put it in classical geotechnical terms, to what extent the shaft resistance is mobilised.) It is also worth noting that this mobilisation is not identical in static and dynamic testing, even on the same pile.
Based on all of this, it is difficult to see how the results of the inverse method can be used to accurately characterise the load-deflection characteristics of the pile, let alone the properties of the soil.
This paper is an interesting study of the problem at hand. While some significant advances have been done in the numerical treatment of the problem, the physics of the pile-soil system need to be re-examined and improved.
A fictitious soil pile (FSP) model is developed to simulate the behavior of pipe piles with soil plugs undergoing high-strain dynamic impact loading. The developed model simulates the base soil with a fictitious hollow pile fully filled with a soil plug extending at a cone angle from the pile toe to the bedrock. The friction on the outside and inside of the pile walls is distinguished using different shaft models, and the propagation of stress waves in the base soil and soil plug is considered. The motions of the pile−soil system are solved by discretizing them into spring-mass model based on the finite difference method. Comparisons of the predictions of the proposed model and conventional numerical models, as well as measurements for pipe piles in field tests subjected to impact loading, validate the accuracy of the proposed model. A parametric analysis is conducted to illustrate the influence of the model parameters on the pile dynamic response. Finally, the effective length of the FSP is proposed to approximate the affected soil zone below the pipe pile toe, and some guidance is provided for the selection of the model parameters.
The topic is an interesting one which I have touched on over the years. It seems to me that their characterisation of the model as “novel” may be a bit of a stretch but their implementation of it is very interesting.
What is a Fictitious Pile Model?
Most of us in the driven pile industry are familiar with the one-dimensional wave equation, which divides up the pile into discrete segments/elements and by doing so models the distributed mass and elasticity (or plasticity) or the system, such as is shown in Figure 1, from the Design and Construction of Driven Pile Foundations, 2016 Edition:
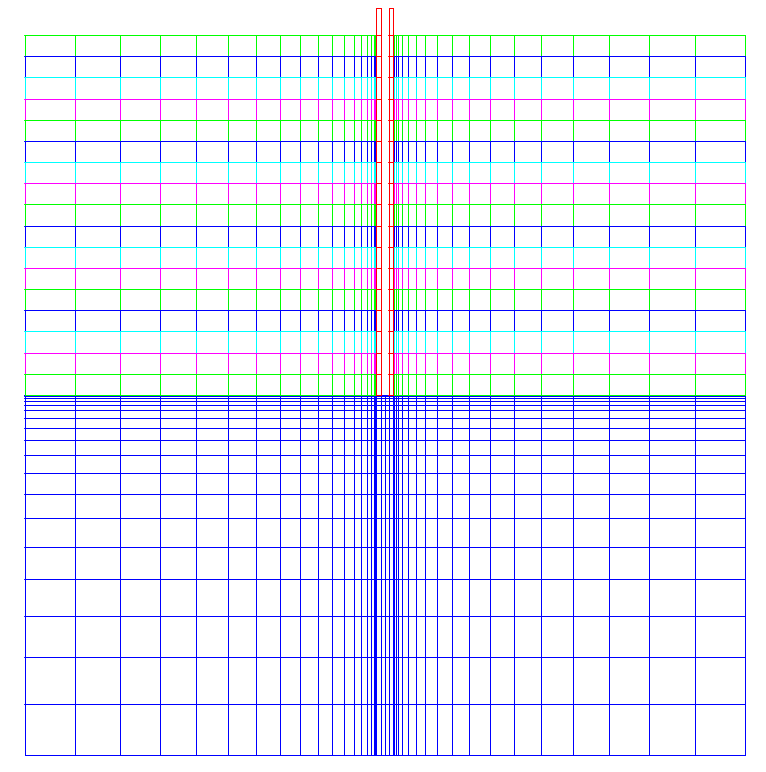
Figure 2. Cross-Section of Finite-Element Model for Pile and Soil (from Warrington (2020))
Note that the pile, which is in red, is basically a one-dimensional string of elements with distributed mass and elasticity. It’s worth noting, however, that using two- (or three- for that matter) dimensional elements enables the element to have a non-uniform stress distribution which would reflect the effect of the soil resistance, but let us set this last point aside.
Such a model as shown above models both the shaft friction along the side of the pile and the toe resistance under the end of the pile. It has been customary over the years, however, for researchers and practitioners alike to model this resistance in a rheological way. This has been easier with the shaft than with the toe, because of the complexities of the dynamic elasto-plastic response of the soil at the toe and the difficulties of establishing failure surfaces in the soil has led to many solutions of the problem.
One of those is to construct a fictitious pile under the toe which, instead of the straight sides we usually (but not always) see with piles, has a conical shape, so as the distance from the toe increases the size of the fictitious pile likewise increases.
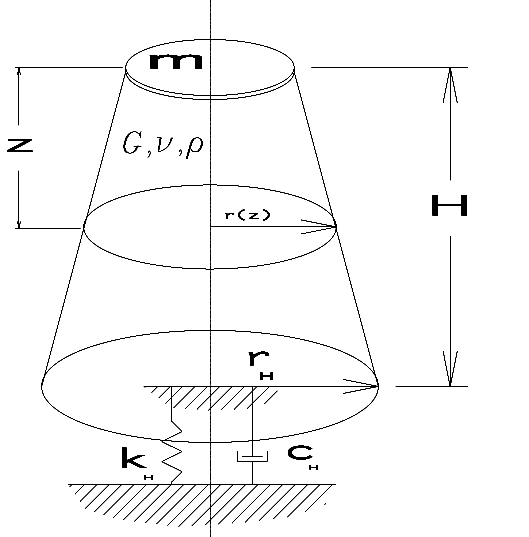
Figure 3. Fictitious Pile Model for the Pile Toe (from Holeyman (1988); Warring- ton (1997))
The first proposal of this came from Holeyman (1988) and was discussed in Closed Form Solution of the Wave Equation for Piles and more recently in the paper STADYN Wave Equation Program 10: Effective Hyperbolic Strain-Softened Shear Modulus for Driven Piles in Clay. A diagram of this is shown in Figure 3. Although the model is generally done (as is the case in the models in Figure 1) with discrete elements, it can be modeled continuously. The paper under consideration did so using finite elements. A problem that occupied this researchers and those of the paper under consideration is the value of H, which does not have an “obvious” solution from the physics of the problem.
In the work under review, in addition to using finite elements the authors made two important improvements to the model shown in Figure 3:
They added a “shaft” resistance along the side of the fictitious piles.
They put a hole in the centre of the fictitious pile to assist in simulating the soil plug, which was one of the main goals of the study. Soil plugging is a difficult phenomenon in open-ended piles, and although we’ve made some progress in modelling it we still have a long way to go.
Some Comments on the Study Itself
The authors used ABAQUS to model both piles. This is a code which has been applied to geotechnical problems for at least thirty years, so it has a long track record. Having started from “scratch” with Improved Methods for Forward and Inverse Solution of the Wave Equation for Piles, I can attest that using a software package saves a great deal of time and effort, in addition to making graphical presentation of the results a good deal simpler. Having said that, if anyone has an ambition to use FEA to replace, say, GRLWEAP or CAPWAP, they’ll have to either a) pay licensing fees to a cut down “engine” from an established package like ABAQUS or b) use an open source alternative.
At the start of the study they make the following statement:
Open-ended pipe piles are increasingly used worldwide as foundations for both land and offshore structures [1,2]; therefore, the characterization of pipe pile capacity and behavior under static and dynamic loading conditions has gained much attention in recent years [3–5].
Open ended pipe piles have been used for much longer that this paragraph would imply, as this whole series will show. Getting them in the ground was much of the impetus for the TTI wave equation program, and the lateral loads they withstood were much of the push behind the development of p-y methods. And that was in the 1960’s and 1970’s.
The soil model they use is a cross between a elastic-purely plastic model and a hyperbolic soil model. Reconciling the two has been a preoccupation of this site since Relating Hyperbolic and Elastic-Plastic Soil Stress-Strain Models: A More Complete Treatment. Although the model they use certainly takes into consideration hyperbolic strain softening, I’m not convinced that their assumption that the rebound runs along the small-strain modulus of elasticity is valid. On the other hand I’m not sure what the best way out of this dilemma is; hyperbolic soil modelling hasn’t been as thorough in analysing the stress-strain characteristics of soil during rebound as it has been in doing so during loading.
Although the relationship between the shear modulus of soils and the void ratio or porosity is well established, the coefficient used to determine the former from the latter is subject to uncertainty.
The static and dynamic shear moduli of soils is different, which is an issue in pile dynamics that has not been adequately explored.
Conclusion
The paper is an excellent step forward, and the model presented has a great deal of potential in pile dynamics. It may be easier to use such a model than a full axisymmetric or 3D model to obtain the inverse solution to the problem, but many of the issues discussed here–such as the angle and depth of the fictitious pile cone and the shear moduli of the soils in question–need better resolution.
As far as the plugging issue is concerned, any advance in this is welcome, although I am inclined to think that a model which simulates the full, blow-by-blow installation of the pile with the formation of the plug, will ultimately be the best solution of the problem.


 (1)
(1)