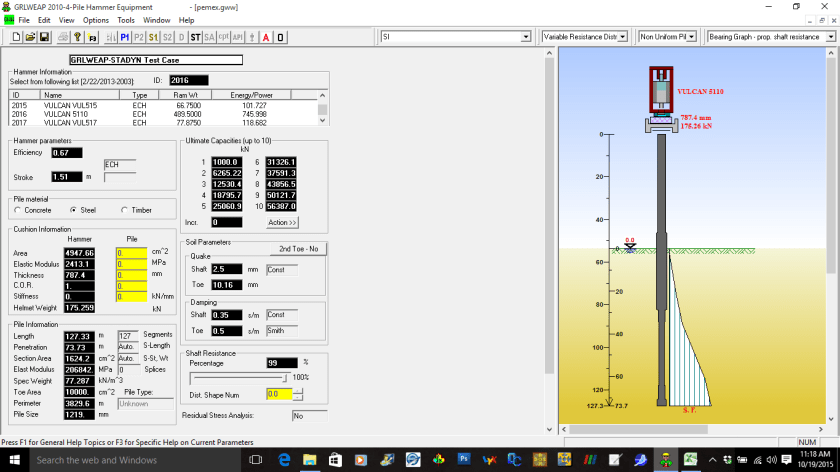
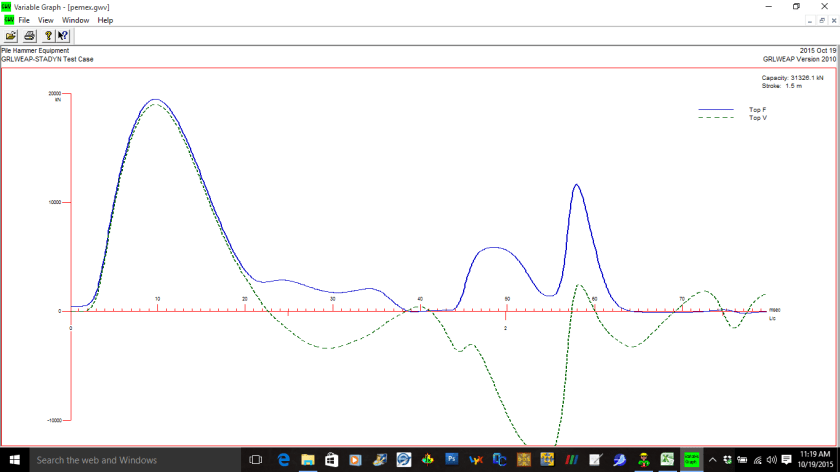
While looking through some files, I found these from the original STADYN project, from the comparison case with GRLWEAP. I’m passing these along to give you an idea of the graphical output of this program. My thanks to Jonathan Tremmier of Pile Hammer Equipment for allowing me to use this copy of GRLWEAP.