In the last post I showed the derivation of the elastic response of a soil to a point load using Boussinesq theory. This is a common part of elementary Soil Mechanics courses but it is uncommon to see the derivation.
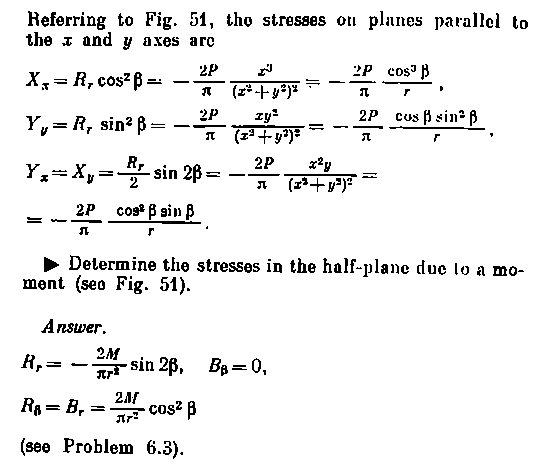
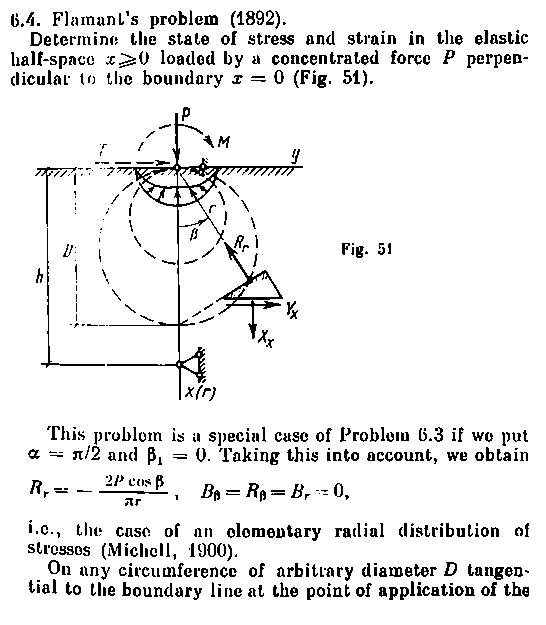
The same situation exists with a line load, the elastic solution usually attributed to Flamant. The solution itself also presented in NAVFAC DM 7.01 and Arnold Verruijt’s Soil Mechanics. The derivation is presented below, and comes from the Manual of the Theory of Elasticity, by V.G. Rekach. Some discussion of similar solutions is in my post Analytical Boussinesq Solutions for Strip, Square and Rectangular Loads and my class presentation is at Soil Mechanics: Elastic Solutions to Soil Deflections and Stresses.