
Mark R. Svinkin
VibraConsult, Cleveland, USA
A. Gordon Shaw
David Williams
The OZA Group, Canada
SYNOPSIS
Construction vibrations may be harmful to adjacent and remote structures, sensitive instruments and people. Construction vibration sources have a wide range of energy, displacement, velocity and acceleration transmitted on the ground. Effects of different dynamic sources and soil conditions on construction vibrations is analysed. Consequences of construction vibrations are developed in various ways. It is important to assess intolerable vibrations before the beginning of construction activities. Guidelines for preconstruction survey are presented. Pre-construction survey and prediction of anticipated vibrations by IRFP method, monitoring and control of measured vibrations are important steps in preventing intolerable vibration effect.
INTRODUCTION
Implementation of construction projects involve various sources of construction vibrations such as pile driving, dynamic compaction, blasting and operating heavy equipment. These sources generate elastic waves in soil which may adversely affect surrounding buildings. Their effects range from serious disturbance of working conditions for sensitive devices and people, to visible structural damage.
The effect of construction vibrations on surrounding buildings, sensitive devices and people in the urban environment is a significant consideration in obtaining projects approvals from appropriate agencies and authorities. Disruption of some businesses, possible structural damage and annoying people are the problems.
The dynamic effect of construction vibrations on adjacent and remote structures depends on soil deposits at a site and susceptibility ratings of structures. It is likely that intolerable structure vibrations may be induced in close proximity of the driven piles, but foundations settlements resulting from soil vibrations in loose soils may occur at various distances from the source.
There are two opposite extreme opinions regarding vibration effects on surrounding neighborhood. On the one hand according to human perception and psychology, construction vibrations are the causes of all damage in structures, but on the other hand the vibration effect from construction activities is negligible, Oriard (26). Both opinions are wrong and misleading. Proper evaluation of vibration effect is necessary.
It is important to assess the dynamic effect before the beginning of construction activities and at the time of construction. Therefore monitoring construction vibrations have to be started prior to the beginning of construction works at a site and be continued during construction to provide the safety and serviceability of sound and vulnerable structures.
Monitoring and control of construction vibrations were studied by a number of researchers e.g. Attewell and Farmer (1), Barkan (2), Crockett (6), Clough and Chameau (4), Dowding (8), Heckman & Hagerty (13), Lacy and Gould (16), Massarsch (21), Mayne (23), Richart et al. (29), Svinkin (37), Wiss (42), Wood and Theissen (43), Woods (44) and others.
This paper presents some guidelines for preconstruction survey, prediction, measurement, analysis and control of soil and structure vibrations generated by construction activities at a site.
CONSTRUCTION VIBRATIONS
Vibrating, impacting, rotating, and rolling construction equipment is used for soil excavation, modification and improvement. Machinery with dynamic loads and blasting are sources of construction vibrations. The most prevalent powerful sources of construction vibrations are pile driving, dynamic compaction, and blasting. Blasting energy is much larger than energy of other sources of construction vibrations. For example, the energy released by 0.5 kg of TNT is 5400 kJ, Dowding (8). Such energy is 50 to 1000 times the energy transferred to piles during driving and 15 to 80 times the energy transferred to the ground during dynamic compaction of soils, Svinkin (37).
Vibration Classification
Ground vibrations generated by construction sources can be roughly separated into two categories: transient and steady-state vibrations.
The first category includes single event or sequence of transient vibrations and each transient pulse of varying duration is dying away before the next impact occurs. Such vibrations are excited by air, diesel or steam impact pile drivers, by dynamic compaction of loose sand and granular fills, and also by highway and quarry blasts. The dominant frequency of propagating waves from impact sources ranges mostly between 3 Hz and 60 Hz, Svinkin (37).
The vibration records of ground vibrations close to the pile driver are similar to those from forge and drop hammers, Steffens (31). The vibration effects from impact hammers are alike to those from vibrations generated by forge hammers because of comparable energy released and the dominant frequency range.
The second category contains continuous harmonic or some other periodic forms. These forced vibrations are caused by vibratory pile drivers, double acting impact hammers operating at relatively high speeds, and heavy machinery.
Vibratory pile driving equipment is wide spread dynamic source of construction vibrations. The most important characteristics of this machines are frequency with the resultant relationships between dynamic force and eccentric moment. Low frequency machines have vibratory frequency between 5-10 Hz and used mainly for piles with big mass and toe resistance such as concrete and large steel pipe piles. Medium frequency machines have the vibratory frequency range of 10-30 Hz and used with light weight piles such as sheet piles and small pipe piles. High frequency machines operate at frequencies of more than 30 Hz. The major advantage of these machines is their lowered transmission of ground excitation to adjacent structures, Warrington (40).
Vibration Propagation
Sources of construction vibrations generate body (compression and shear) waves and surface waves of which Rayleigh waves are the primary type, Barkan (2) and Richart et al. (29). These waves transmit vibrations through soil medium. Rayleigh waves have the largest practical interest for design engineers because building foundations are placed near the ground surface. In addition, surface waves contain more than 2/3 of the total vibration energy and their peaks particle velocity are major on the velocity records.
Rayleigh waves induce vertical and radial horizontal soil vibrations. In horizontal layering soil medium, a large transverse component of motion could be caused by a second type of surface waves called Love waves rather than other wave types. Waves propagate outward the source in all directions. Spectra of the radial and transverse components of horizontal soil vibrations may have a few maxima and the one corresponding the frequency of the source is not always the largest. In general, faster attenuation of high frequency components is the primary cause of changes of soil vibrations with distance from the source. However, some records can not be explained by this mechanism and the effect of soil strata heterogeneity and uncertainties of the geologic profile should be taken into account, Svinkin (34).
The waves travel outward from the construction source and attenuate in the results of geometrical spreading and material damping. It is common to calculate displacement amplitude reduction of the Rayleigh wave between two points at distances r1 and r2 from the source as (r1/r2)0.5 with a factor exp[-α(r1-r2)] where α is the coefficient of attenuation, Golitsin (10). However, there are certain difficulties in determination of the coefficient, α, for ground vibrations from construction and industrial sources. This coefficient could be inadequate for different distances between points of measurements. On account of wave refraction and reflection from boundaries of diverse soil layers, an arbitrary arrangement of geophones at a site can yield incoherent results of ground vibration measurements because waveforms measured at arbitrary locations at the site might represent different soil layers, Svinkin (37).
Besides, the coefficient, α, depends on the soil resistance to pile penetration. During hard driving, these coefficients tend to be higher than those where hard driving is not encountered. According to experimental data from Clough and Chameau (4), the coefficients, α, were 1.3-2.5 times greater for hard driving than those for normal driving.
A scaled-distance approach, Wiss (42) and Woods (44), uses relationship between energy, W, of source and surface distance, D, where velocity, v, is calculated as (D/W0.5)-n where the value of ‘n’ yields a slope in a log-log plot between 1 and 2. The modified scaled-distance approach provides calculation of the peak particle velocity (PPV) of ground vibrations as a function of the source velocity, Svinkin (35).
Mayne (23) suggested for dynamic compaction a relationship between the impact velocity of a free falling weight and PPV of ground vibrations as PPV= 0.2(2gH)0.5(d/r0)-1.7 where g = gravitational constant, H = falling height, d/r0 = distance normalized to the weight radius.
Empirical equations employed for assessment of expected soil vibrations from construction and industrial sources usually only allow calculation of a vertical peak amplitude of vibrations and not always with sufficient accuracy. These equations cannot incorporate specific differences of soil conditions at each site because heterogeneity and spatial variation of soil properties strongly affect characteristics of propagated waves in soil from construction and industrial vibration sources.
A new Impulse Response Function Prediction method (IRFP) has been originated by Svinkin (34, 36) for determining complete time domain records on existing soils, structures and equipment prior to installation of construction and industrial vibration sources. The IRFP method has significant advantages in comparison with empirical equations and analytical procedures.
Vibration Damage and Disturbance Criteria
A number of attempts have been made to connect vibration parameters (displacement, velocity and acceleration) with observed human annoying, disturbances of sensitive devices, and structural damage, for example, Crandell (5), Medearis (24), Nichols et al. (25), Raush (28), Siskind et al. (30) and others. Richart et al. (29) demonstrated some results of such studies in graphical form for structure and machine vibration limits combined with human perception limits.
It was found that structural damage could be well correlated with the peak particle velocity (PPV) of structure vibrations. The same criterion for structural damage of residential buildings was set at 50 mm/s peak particle velocity in the frequency range of 3-100 Hz, Nichols et al. (25). For commercial and engineered structures, Wiss (41) suggested to use a conservative limit of 100 mm/s.
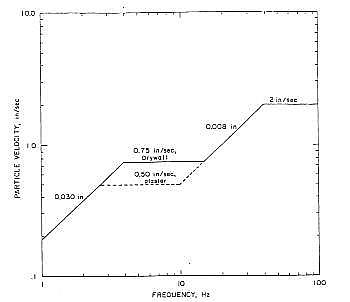
Building damage occurs in the result of combined influence of structure vibration displacement, velocity, acceleration and frequency. The necessity to take into account the vibration frequency to assess the vibration effect on structures was underlined in a number of publications, for example, Dowding (7, 8), Medearis (24), Siskind et al. (30), Svinkin (32) and others. Intensive studies of residential structural damage in connection with measured displacement and velocity was made by the U.S. Bureau of Mines, Siskind (30). As the results, a set of criteria was developed for the frequency range of 1-100 Hz, involving both displacement and velocity, Figure 1.
The peak particle velocity is the parameter most commonly used to evaluate the effect of construction vibrations on structure. However, other vibration parameters should be used in assessment of vibration effects as well. So Figure 1 shows the importance of displacement limits to evaluate structural damage. Displacement of 0.1 mm, and acceleration of 2.5 m/s2, not velocity, are vibration limits for computing systems, Boyle (3).
There are simple mathematical relationships between peaks of displacement, velocity and acceleration. Displacement calculations from velocity records are correct, but analogous acceleration calculations do not always yield proper results because velocity measurement cannot detect high frequency components of ground vibrations. Accelerometers and geophones have the opposite principles for vibration measurements. If acceleration limits are available for sensitive devices or foundation settlements, acceleration must be measured in parallel to velocity measurements. For example, Clough and Chameau (4) made acceleration and velocity measurements at the same time. One more important point is to use devices with proper calibration curves. Otherwise it is possible to receive misleading results.
SURVEY OF CASE STUDIES
There are numerous publications regarding vibration effects from construction operations. Several references are presented in the introduction section of this paper. In this section, an attempt was made to analyse obtained results and assess contribution of different factors on construction vibrations.
Source Effect on Ground Vibrations
Pile Type. In general, piles being driven as displacement piles generate the greatest ground vibrations, e.g. Woods (44), Svinkin et al. (38) and others. However, there effects are varied and depend on pile cross-section shape and soil conditions. The more pronounced effects of displacement piles on ground vibrations occurs predominantly at distances less than 10 m from pile driving,
A pile shape may affect ground vibrations around the driven pile. Martin (20) found that driving of sheet piles do not generate large horizontal vibrations in perpendicular direction to the line of the sheet piles.
Pile impedance is a significant factor in the transfer of dynamic longitudinal force into the pile and from the pile into the surrounding soil. The greater the pile impedance, the greater the pile capacity and the greater the dynamic force that can be transferred to the ground. However, pile impedance affects the intensity of ground vibrations in two opposite ways at the same time. On the one hand, increasing pile impedance increases the force transmitted to the pile and surrounding ground, but on the other hand, increasing pile impedance decreases the peak particle velocity of pile and ground vibrations. An increase of hammer energy magnifies ground vibrations until the pile impedance allows to increase the force transmitted to the pile and the surrounding soil. The impedance affects in opposite ways the force and the velocity transmitted to the ground and therefore the pile impedance effect on the intensity of ground vibrations is not obvious. Pile impedance cannot be always used as a predictor of intensity of ground vibrations, Svinkin et al. (38).
Soil Resistance and Pile Length. During driving, the various soil resistances to pile penetration are developing as the pile penetration depth is increasing. Pile-soil load transfer is realized by means of both concentrated loads from the pile toe and distributed loads generated along the pile shaft. Generally speaking, dynamic loads transferred from the pile to the ground should be increasing with augmentation of a pile penetration depth. However, this does not always occur. Accumulated experience in pile driving shows that the intensity of ground vibrations is mostly independent of the pile penetration depth and depends on soil properties, for example, Clough and Chamean (4), Holloway et al. (15), Svinkin et al. (38) and others.
In soils with a low penetration resistance such as loose fill, peat or silt, a large portion of the hammer energy is used in overcoming soil friction and thereby moving piles down. Therefore less energy is transmitted for generating ground vibrations in comparison with pile driving in soil with a high penetration resistance. The high blow count resulted in increased ground vibrations at the pile penetration depth approximately between 4-8 m below the ground surface but did not effect ground vibrations at the greater depth. These results were obtained from driving of concrete, steel shell and H piles and also of sheet piles.
Dynamic Compaction. For dynamic compaction of loose sands and granular fills, large and heavy steel or concrete blocks weighing typically 49.1-137.3 kN are usually dropped from heights of up to 30 m, Hayward Baker (12). The size of weights could be larger at some construction sites. The maximum falling weight found in publications was 397.3 kN, Gambin (9).
The wide range of impact loads on the ground determines a wide range of ground vibrations. Vibration levels increase as the treated field becomes densified. A maximum level of particle velocity might be achieved after one or two passes of heavy tamping. It is necessary to point out that localized liquefaction may occur around the contact area of impact, Mayne (22).
Dynamic loads on the ground induce elastic waves in the soil medium and these waves are transmitted through the soil in all directions. The spectra of soil vibrations excited by impacts show a few maximums with the dominant frequency of the surface wave. Actually, these frequencies are the natural frequencies of the soil layers and the values obtained do not practically depend on conditions at the contact area where impacts are made directly on the soil. In general, soil profiles are nonlinear systems and the dominant frequency of soil profiles depends on the applied impact. Nevertheless, over a certain range, the system behavior may be linear and if the system is restricted to this range it is possible to safely use the linear approach. However if sizes of falling weights are considerably different, such impacts on the same contact area might generate surface waves with different dominant frequencies, Svinkin (33, 34).
Blasting. Blasting energies are much larger than energies of other sources of construction vibrations. Blast design depends on the large number of factors and is aimed to enhance blasting productivity and diminish generated ground vibrations without increasing the cost. The following describes effects of different factors on ground vibrations, Nicholls et al. (25), Dowding (8) and OZA Inspections (27).
Explosive type and weight, delay-timing variations, size and number of holes, distance between holes and rows, method and direction of blast initiation, geology and overburden are the most important causes which effect ground vibrations. The explosive types affect ground motion through detonation velocities of explosives and a square root of the charge weight. Microsecond-delayed blasts are used for reduction of PPV of ground vibrations which are connected with the maximum charge weight detonated per delay. A choice of the proper delay is not a simple problem. Wave propagation might differ with direction if there is geologic complexity. The effect of overburden manifests itself in attenuation of high-frequency components of ground motion.
Energy of Dynamic Sources. The energy of construction sources is important source property which effects intensity of surface waves, e.g. Attewell and Farmer (1), Mayne (23), Wiss (42), Woods (44) and others. In general, ground vibration level increases if the source energy increase. However the energy of source is not always the dominant factor in determination of the intensity of ground vibrations. The following case studies shows that influence of other factors should be considered.
The effect of energy level of dynamic compaction on PPV of ground vibrations at different distances from the source was studied by Mayne (23). It was revealed that the exponent term for energy of the source, W, decreases with distance away from the point of impact. At distances of 6.1, 15.25, and 30.5 m, the observed effect of energy level was ![]() 0.6,
0.6, ![]() 0.5, and
0.5, and ![]() 0.4, respectively, as determined from linear regression analysis of obtained data.
0.4, respectively, as determined from linear regression analysis of obtained data.
Martin (20) reported similarity of PPV of vertical ground vibrations observed for displacement piling on peat and corresponding PPV observed for sheet piling on silt and clay. Although the impact energy of the hammer used for driving of close-ended steel pipes was in ten times the energy of the hammer used for sheet piling, the intensity of vertical ground vibrations was similar at the compared construction sites. The minor reason of these results was explained by differences in the geometry of the piles. The displacement pile had a circular section and the energy transmitted from this pile to the ground was shared between vertical and two horizontal components of ground vibrations. The sheet pile had a ‘U’ shaped section and driving of this pile produced predominantly vertical ground vibrations. The major reason for the comparatively low level of vertical vibrations from displacement piling operation was the low penetration resistance of the peat. A large portion of the energy transferred to the pile was absorbed in moving the pile through the peat.
Dowding (8) made comparison of ground vibrations induced by pile driving with a diesel hammer and by Franki pile driving and revealed that the latter developed two times more energy but induced smaller ground vibrations at the same distances from the sources. Perhaps the cause of this phenomenon was a higher attenuation of surface waves in the loose soil deposits where Franki piles were driven. This observation underlines the significance of soil contribution to the formation of ground vibrations.
Soil Effect on Vibrations Propagation
Distance from Sources. Waves travel in all directions from the source of vibrations forming a series of fairly harmonic waves with the dominant frequency equal or close to the frequency of the source. Higher frequencies being attenuated faster than lower frequencies with distance from the source. However, the soil medium does not consistently play the role of a low-pass filter and ground vibrations with higher frequencies and amplitudes may arise after certain vibration attenuation.
The inherent spacial variations of soil properties are not always readily identifiable by routine boring, sampling, and testing. For instance, Hammond (11) reported a case history of the influence of heterogeneity in soil strata on soil and building vibrations at the site where a foundation was installed for a forge hammer with a falling weight of 75.8 kN. The dominant frequency of propagated waves was 22.0 Hz to the west of the hammer foundation, while, at the same time, in opposite direction to the east of the source, the dominant frequency was 10.0 Hz. In another interesting case, Svinkin (34), forge hammer foundation vibrations with a frequency of 14.0 Hz excited soil vibrations with a similar dominant frequency except at one location where the dominant frequency was 25.0 Hz with enhanced amplitudes.
Soft and Stiff Soils. Attenuation of surface waves with distance from the source is important for reduction of ground vibrations. Clough and Chameau (4), Wiss (42) and Wood and Theissen (43) made intensive measurements of ground vibrations from construction sources and revealed that values of geometric and material damping are higher in soft soils than those in denser, firmer soils. Moreover, PPVs of ground vibrations tend to increase as soil materials become more dense with the number of blows, Mayne (22). Nevertheless, there is an opposite point of view. Taniguchi and Okada (38) described a case where soft ground was improved to depth of 12 m by means of the lime pile method. As a result, the acceleration at the ground surface decreased to 10-60 % in the frequency range less than 10 Hz. Indeed, various soil conditions require different solutions to diminish ground vibrations.
Martin (20) reported results of measured ground vibrations which had been induced by Love waves. A closed-ended pipe pile was being driven by a drop hammer into the soft clay to the depth of about 8 m and then into the gravel layer. When the pile reached the gravel level, PPV of transverse ground vibrations increased two times but PPV of vertical and radial motion were almost the same. The large transverse vibrations were a Love surface wave. Similar large transverse ground motion was recorded by Clough and Chameau (4) during driving sheet piles through the rubble layer by an ICE Model vibratory hammer at an operated fixed frequency of 1,100 rpm.
CONSEQUENCES OF CONSTRUCTION VIBRATIONS
Vibrations transmitted through the ground during construction operations may annoy people and detrimentally effect structures and sensitive devices.
Construction vibrations effect structures in two major ways. Those vibrations may produce direct damage to structures and make damage due to vibration-induced settlement.
Structure Vibrations. Structure vibrations depend on soil-structure interaction which determines a structure response to the ground excitations. Structure vibrations measured from construction operations vary in a wide range of frequency content and intensity.
Case studies made by Wood and Theissen (43) included ten projects with vibration levels measured in buried structures and buildings supported on piles at soft soil sites and on spread footings at firm soil sites. It was concluded that vibratory hammers of about 23 kg-m eccentric moment or impact hammers of about 94 kJ rated energy with a weight of striking parts of 43.3 kN operating immediately adjacent to unreinforced brick or reinforced concrete structures in poor conditions may be in some degree dangerous for building. Similar construction sources operating immediately adjacent to reinforced concrete structures in good conditions will probably do not produce dangerous structure stresses. Results obtained by Mallard and Bastow (19) and Martin (20) showed that vibrations of light floors are larger and concrete floors are smaller than ground vibrations.
The proximity of the frequency of soil vibrations to one of the structures natural frequencies may generate the condition of resonance in the building. Continuous forced vibrations produced by vibratory hammers have potential to set up resonant vibrations in certain building structures. Moreover transient vibrations might trigger resonant vibrations as well. Levin (17) found that 3-4 cycles of ground vibrations could generate the condition of resonance in the building. Rausch (28) described a case history where intolerable vibrations occurred in an administrative building located 200 m from the foundation of a forge hammer with a falling weight of 14.7 kN. This weight was considerably less than that in the described above case, Wood and Theissen (43), but obviously the condition of resonance played the major role.
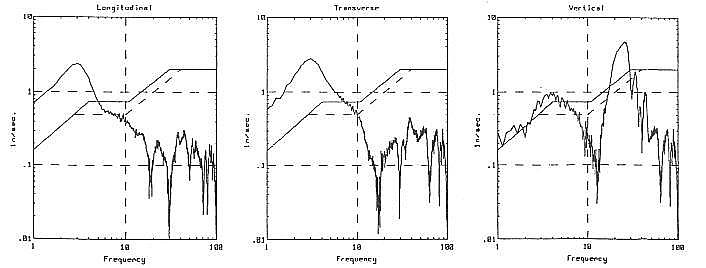
The damage criteria in Figure 1 are used as a threshold level, but it does not mean that exceeding this level immediately entail some structural damage. For example, ground vibrations measured nearby the school building located at distance of 24.4 m from a construction blast are shown in Figure 2, OZA Inspections (27). It can be seen that PPV of vertical, radial and transverse ground vibrations were higher of the threshold levels for the wide frequency range. Such vibrations did not result damage of one story brick school building supported on concrete foundations.
One more important comment. The damage criteria displayed in Figure 1 do not make distinction of type, age and conditions of structures and foundations. Probably more objective and informative damage criteria are a subject for future research.
Crockett (6) and Dowding (8) suggested to take into account the accumulated effect of repeated dynamic loads, for example from production pile driving. This approach is especially important for historical and old buildings.
On the basis of probabilistic analysis of a numerous published data, Siskind et al. (30) made a damage description for Uniform Classification. The three damage categories included the following. Threshold: loosening of paint, small plaster cracks at joints between construction elements. Minor: lengthening of old cracks, loosening and falling of plaster, cracks in masonry around openings near partitions, hairline to 3 mm cracks, fall of loose mortal. Major: cracks of several millimetres in walls, rupture of opening vaults, structural weakening, fall of masonry, load support ability affected. This classification can be useful in assessment of structural damage from construction vibrations.
Settlements Induced by Vibrations. Vibrations may change properties of loose sands saturated with water. This physical phenomenon produces settlement of the ground around the pile and building foundations. Lacy and Gould (16) collected 19 reported cases with different settlements of sands caused by pile driving, described a few approaches to calculate ground settlement, and underlined problems in calculation of settlement of loose sand during pile driving.
It is not clear what vibration parameter and its value should be considered as a trigger of a liquefaction phenomenon of sand. Lacy and Gould (16) consider PPV of ground vibrations of 2.5 mm/sec as a threshold of possible significant settlements at vulnerable sites. Clough and Chameau (4) and Lukas and Gill (18) used an acceleration for assessment of ground and foundation settlement. Barkan (2) reported an important role of the static pressure on the soil for dynamic settlement of a foundation. Therefore different criteria should be taken into consideration in assessment of potential liquefaction problem.
Human Responses. Human perception of vibrations is subjective and human response to arisen vibrations may have false reasoning. Therefore contractor have to provide proper public relations to inform residents regarding possible negative effects of construction vibrations.
MITIGATION OF VIBRATION PROBLEMS
A pre-construction survey is the first step in the control of construction vibrations to ensure safety and serviceability of adjacent structures and/or distant structures with sensitive equipment like hospital facilities and offices with precision instruments. According to pile driving practice, construction vibrations may cause direct damage to structures at a distance about of one pile length from the driven pile. However, there is no single opinion regarding the maximum radius of a preconstruction survey area with buildings surrounding a construction site. Dowding (8) suggested a radius of 120 m of a construction activities, or out to a distance at which vibrations of 2 mm/s occur. Woods (44) considered distances of as much as 400 m to be surveyed to identify settlement damage hazards. Obviously, a radius of the area of preconstruction survey is various and depends on building condition and utilization.
The preconstruction survey includes a few steps of site investigations.
|
|
|
|
First of all a preliminary desk study of a layout of the area for a preconstruction inspection and a site walk-over observation should be made. Existing cracks found in buildings have to be marked. It is necessary to distinguish cosmetic and structural cracks. Most attention should be paid to cracks in the structures themselves. The width of cracks should be measured with a proper ruler. Determining the cause of cracking is important to predict lengthening and dilatation of old cracks under the vibration effect of pile driving.
For assessment of the dynamic effect on surrounding structures it is necessary to take into account the thresholds of damage, cracking and perception. Buildings inspected under the contract requirements are commonly classified depending on structure susceptibility to cracking and proximity of structures to pile driving operations.
Structure susceptibility is usually related to the threshold of cosmetic cracking, Dowding (7), and depends on a degree of degradation of the building structural and nonstructural systems. Apparently this terminology should be used in the broad sense as susceptibility of the building-soil system depending on degradation of building systems, utilization of buildings and soil conditions. It is important for certain cases. For example, a building, located in the proximity of the driven piles, identified as having low susceptibility and built on liquefiable soils might have substantially larger deformations than a building identified as having high susceptibility but erected on non-liquefiable soils at long distance from the driven piles. Certainly, for some sites only the threshold of cosmetic cracking could be sufficient.
Measurement of a vibration background at soil and buildings with sensitive equipment and/or computerized technology should be a part of the preconstruction survey. The vibration measurement might reveal microvibrations and vibrations induced by industrial machinery located nearby. A waveform recorder has to be used for these measurements.
Assessment of the dynamic effect of construction operations on surrounding structures can be made on the basis of prediction, monitoring and control of soil and structures vibrations from pile driving.
CONCLUSIONS
|
|
|
|
|
|
|
REFERENCES:
1. ATTEWELL, P.B. and FARMER, I.W. Attenuation of ground vibrations from piles. Ground Engineering, 1973, Vol. 6(4), pp. 26-29.
2. BARKAN, D.D. Dynamics of bases and foundations. McGraw Hill Co., New York, 1962.
3. BOYLE, S. The effect of piling operations in the vicinity of computing systems. Ground Engineering, 1990, June, 23-27.
4. CLOUGH, G.W. and CHAMEAU, J.L. Measured effects of vibratory sheetpile driving. Journal of the Geotechnical Engineering Division, ASCE, 1980, Vol. 106, No. GT10, 1081-1099.
5. CRANDELL, F.J. Ground vibration due to blasting and its effects upon structures. Journal of the Boston Society of Civil Engineers Section/ASCE, 1949, Vol. 3, 222-245.
6. CROCKETT, J.H.A. Piling vibrations and structural fatigue. Recent Developments in the Design and Construction of Piles, The Institution of Civil Engineers, London, 1980, 305-320.
7. DOWDING, C.H. Ground-structure response to blasting vibrations. Proceedings of the 14th Annual meeting, Society of Engineering Science, 1977, 1085-1093.
8. DOWDING, C.H. Construction Vibrations. Prentice Hall, Upper Saddle River, 1996.
9. GAMBIN, M.P. Menard Dynamic Compaction. Proceedings of ASCE National Capital Section Seminar on Ground Reinforcement, George Washington University, Washington, D.C., January 1979.
10. GOLITSIN, B.B. On dispersion and attenuation of seismic surface waves (in German). Russian Academy of Science News, 1912, Vol. 6, No. 2.
11. HAMMOND, R.E.R. Vibration-controlled foundations at Salten. Iron and Steel, 1959, Vol.32, No.3.
12. HAYWARD BAKER. Dynamic Compaction – Information, Odenton, Maryland, 1999.
13. HECKMAN, W.S. and HAGERTY, D.J. Vibrations associated with pile driving. American Society of Civil Engineers, ASCE Journal of the Construction Division, 1978, Vol. 104, No. CO4, pp. 385-394.
14. HEISEY, J.S., STOKOE, K.H.II, and MEYER, A.H. Moduli of pavement systems from spectral analysis of surface waves. Research Record No. 852, Transportation Research Board, 1982, 22-31.
15. HOLLOWAY, D.M., MORIWAKI, Y, DEMSLY, E., MOORE, B.H. & PEREZ, J.Y. 1980. Field study of pile driving effects on nearby structures, Special Technical Publication, Minimizing Detrimental Construction Vibrations, Preprint 80-175, New York, 1980, 63-100.
16. LACY, H.S. and GOULD, J.P. Settlement from pile driving in sands. American Society of Civil Engineers, Proceedings of ASCE Symposium on Vibration Problems in Geotechnical Engineering, Detroit, Michigan, G. Gazetas and E.T. Selig, Editors, 1985, 152-173.
17. LEVIN, G.E. Dynamic influence of drop hammer foundations on surrounding structures (in Russian). Proceedings of the Second Conference on Dynamics of Bases and Foundations, 1969, 147-152. Moscow: NIIOSP
18. LUKAS, R.G. and GILL, S.A. Ground movement from piling vibrations. Piling: European practice and worldwide trends, Thomas Telford, London, 1992, 163-169.
19. MALLARD, D.J. and BASTOW, P. Some observations on the vibrations caused by pile driving. Recent Developments in the Design and Construction of Piles, The Institution of Civil Engineers, London, 1980, 261-284.
20. MARTIN, D. Ground vibrations from impact pile driving. Transport and Road Research Laboratory, Supplementary Report 544, Crowthorne, England, 1980.
21. MASSARSCH, K.R. Keynote lecture: Static and dynamic soil displacements caused by pile driving. Proceedings of the Fourth International Conference on the Application of Stress-Wave Theory to Piles, F.B.J. Barends, Editor, The Hague, The Netherlands, 1992, 15-24.
22. MAYNE, P.W. Ground response to dynamic compaction. Journal of Geotechnical Engineering, ASCE, 1984, Vol. 110, No. 6, 757-774.
23. MAYNE, P.W. Ground vibrations during dynamic compaction. American Society of Civil Engineers, Proceedings of ASCE Symposium on Vibration Problems in Geotechnical Engineering, Detroit, Michigan, G. Gazetas and E.T. Selig, Editors, 1985, 247-265.
24. MEDEARIS, K. Development of rational damage criteria for low-rise structures subjected to blasting vibration. Proceedings of the 18th Symposium on Rock Mechanics, 1977.
25. NICHOLLS, H.R., JOHNSON, C.F., and DUVALL, W.I. Blasting vibrations and their effects on structures. U.S. Department of Interior, Bureau of Mines Bulletin 656, 1971.
26. ORIAD, L.L. The effects of vibrations and Environmental forces. International Society of Explosives Engineers, Cleveland, 1999.
27. OZA Inspections Ltd. Construction vibrations and noise monitoring – Reports 1990-1999, Lewiston, New York.
28. RAUSCH, E. Maschinen fundamente (in German), VDI-Verlag, Dusseldorf, Germany, 1950.
29. RICHART, F.E., HALL, J.R. and WOODS, R.D. Vibrations of soils and foundations. Prentice-Hall, Inc., Englewood Cliffs, New Jersey, 1970, 414.
30. SISKIND, D.E., STAGG, M.S., KOPP, J.W., and DOWDING, C.H. Structure response and damage produced by ground vibrations from surface blasting. Report of Investigations 8507, U.S. Bureau of Mines, Washington, D.C., 1980.
31. STEFFENS, R.J. Structural vibration and damage. Building Research Establishment Report, HMSO, 1974.
32. SVINKIN, M.R. Pile driving induced vibrations as a source of industrial seismology. Proceedings of the 4th International Conference on the Application of Stress-Wave Theory to Piles, The Hague, The Netherlands, F.B.J. Barends, Editor, A.A. Balkema Publishers, 1992, 167-174.
33. SVINKIN, M.R. Discussion of ‘Impact of weight falling onto the ground’ by Roesset, J.M. et al., Journal of Geotechnical Engineering, ASCE, 1996, Vol. 122, No. 5, 414-415.
34. SVINKIN, M.R. Overcoming soil uncertainty in prediction of construction and industrial vibrations. American Society of Civil Engineers, ASCE, Proceedings of Uncertainty in the Geologic Environment: From theory to Practice, Geotechnical Special Publications No. 58, C.D. Shackelford, P. Nelson, and M.J.S. Roth, Editors, 1996, Vol. 2, 1178-1194.
35. SVINKIN M.R. Velocity-impedance-energy relationships for driven piles. Proceedings of the Fifth International Conference on the Application of Stress-Wave Theory to Piles, Orlando, F. Townsend, M. Hussein and M. McVay, Editors, 1996, 870-890.
36. SVINKIN, M.R. Numerical methods with experimental soil response in predicting vibrations from dynamic sources. Proceedings of the Ninth International Conference of International Association for Computer Methods and Advances in Geomechanics, Wuhan, China, J.-X. Yuan, Editor, A.A. Balkema Publishers, 1997, Vol. 3, 2263-2268.
37. SVINKIN, M.R. Prediction and calculation of construction vibrations. DFI 24th Annual Members’ Conference, Decades of Technology – Advancing into the Future, 1999, 53-69.
38. SVINKIN, M.R., ROTH, B.C., and HANNEN, W.R. The effect of pile impedance on energy transfer to pile and ground vibrations. Proceedings of the Sixth International Conference on the Application of Stress-Wave Theory to Piles, Sao Paulo, Brazil, 2000.
39. TANIGUCHI, E. and OKADA, S. Reduction of ground vibrations by improving soft ground. Soil and Foundations, JSSMFE, 1981, Vol. 21, No. 2, 99-113.
40. WARRINGTON, D.C., 1992. Vibratory and impact-vibration pile driving equipment. Pile Buck, Inc., Second October Issue, 1992, 2A-28A.
41. WISS, J.F. Effect of blasting vibrations on buildings and people. Civil Engineering, ASCE, 1968, July, 46-48.
42. WISS, J.F. Construction vibrations: State-of-the-Art. American Society of Civil Engineers, ASCE Journal of Geotechnical Engineering, 1981, Vol. 107, No. GT2, 167-181.
43. WOOD, W.C and THEISSEN, J.R. Variations in adjacent structures due to pile driving. Proceedings of the GEOPILE Conference, San Francisco, 1982, 83-107.
44. WOODS R.D. Dynamic effects of pile installations on adjacent structures. Synthesis Report, National Cooperative Highway Research Program NCHRP Synthesis 253, Washington, D.C., 1997.
 (1)
(1)



 Heckman and Hagerty (1978) and Massarsch (1992) pointed out the important effect of the pile impedance on the peak ground velocity and showed that a reduction of the pile impedance from 2000 to 500 kNs/m could increase the peak ground velocity by a factor of 8 (Fig. 2). According to equation (4), the peak particle velocity of the source is inversely proportional to the square root of the pile impedance and, for the referenced impedance range, the expected amplification of the peak pile velocity and the peak ground velocity can only be 2. Equation (4) shows that pile length, velocity of wave propagation in the pile, and transferred energy also can affect the peak ground velocity by means of the wave source velocity.
Heckman and Hagerty (1978) and Massarsch (1992) pointed out the important effect of the pile impedance on the peak ground velocity and showed that a reduction of the pile impedance from 2000 to 500 kNs/m could increase the peak ground velocity by a factor of 8 (Fig. 2). According to equation (4), the peak particle velocity of the source is inversely proportional to the square root of the pile impedance and, for the referenced impedance range, the expected amplification of the peak pile velocity and the peak ground velocity can only be 2. Equation (4) shows that pile length, velocity of wave propagation in the pile, and transferred energy also can affect the peak ground velocity by means of the wave source velocity.

 (10)
(10) (11)
(11)
 (2)
(2) (8)
(8) (9)
(9) (10)
(10) (11)
(11)